
Just a quick post, last night was quite a moment for us. This week Keith and Phil have been working on the laser cut files and they have now been put together and we actually have a robot. TractorBot 2015 has left the virtual world and now actually exists in reality.
-
- Soldering thicker wires to the motors
-
- The laser cut parts have arrived
-

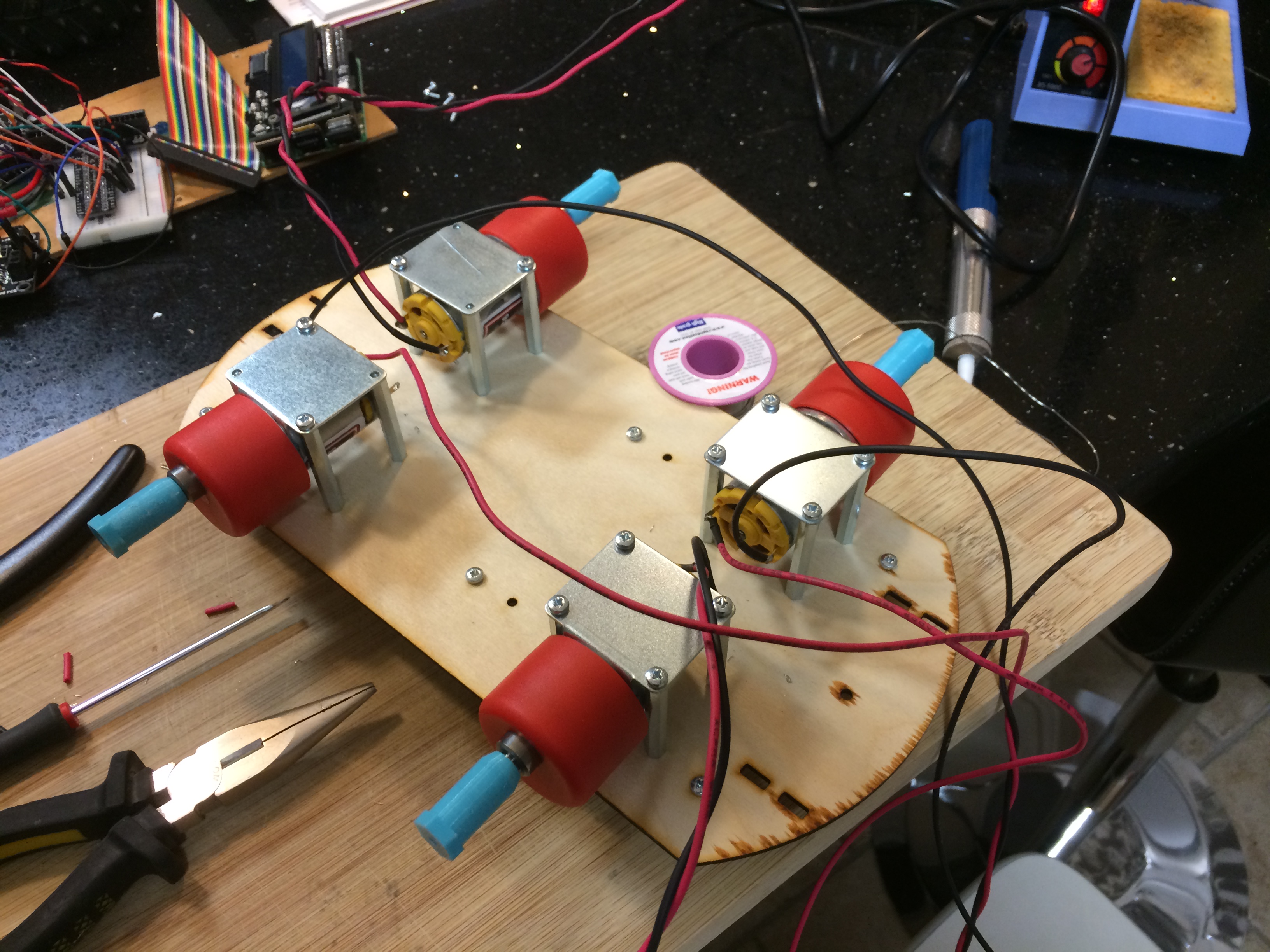
- Assembly starts, we even designed cable tie slots
-
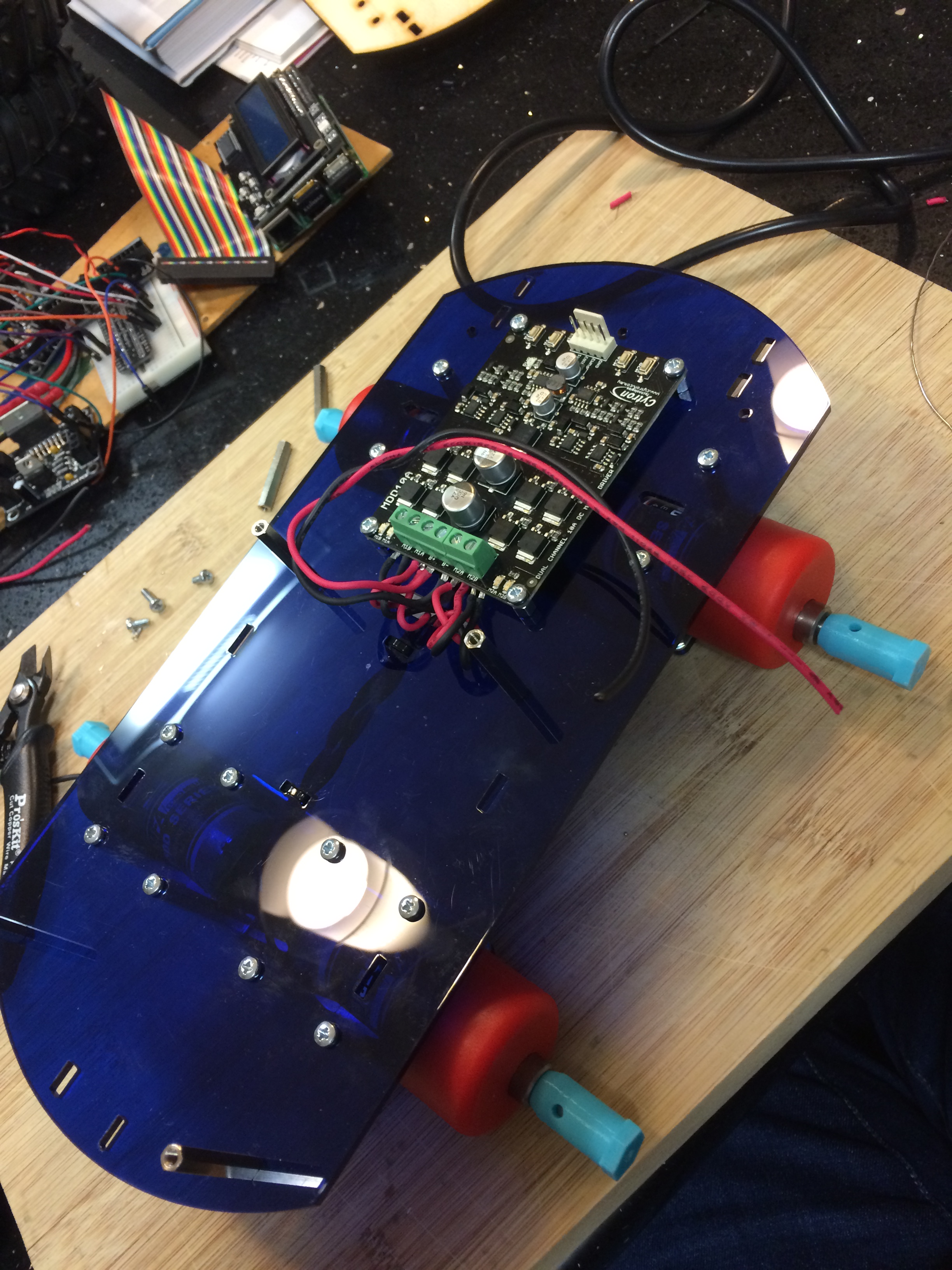
- On goes the motor driver
-
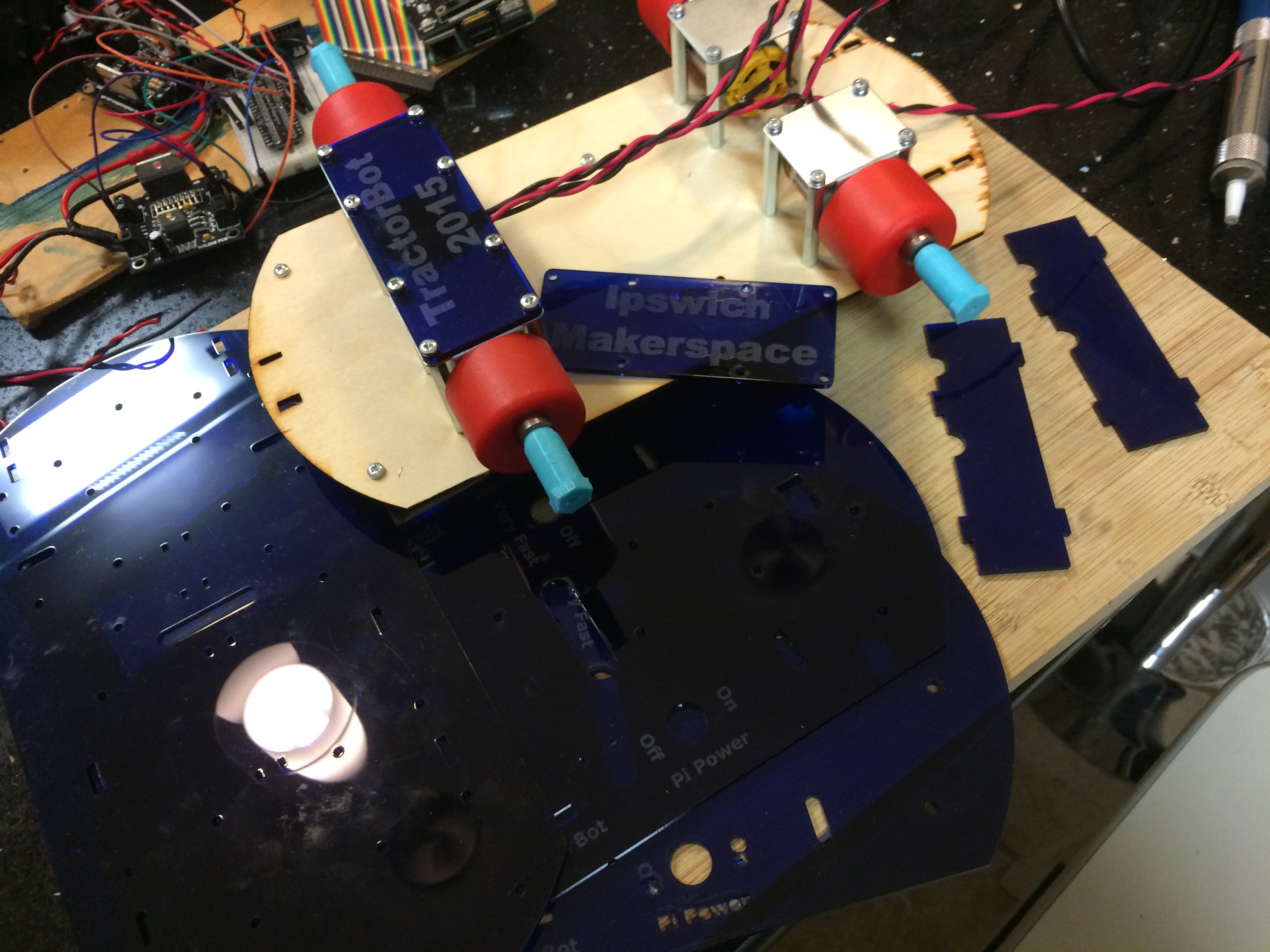
- Top plate goes on with switches
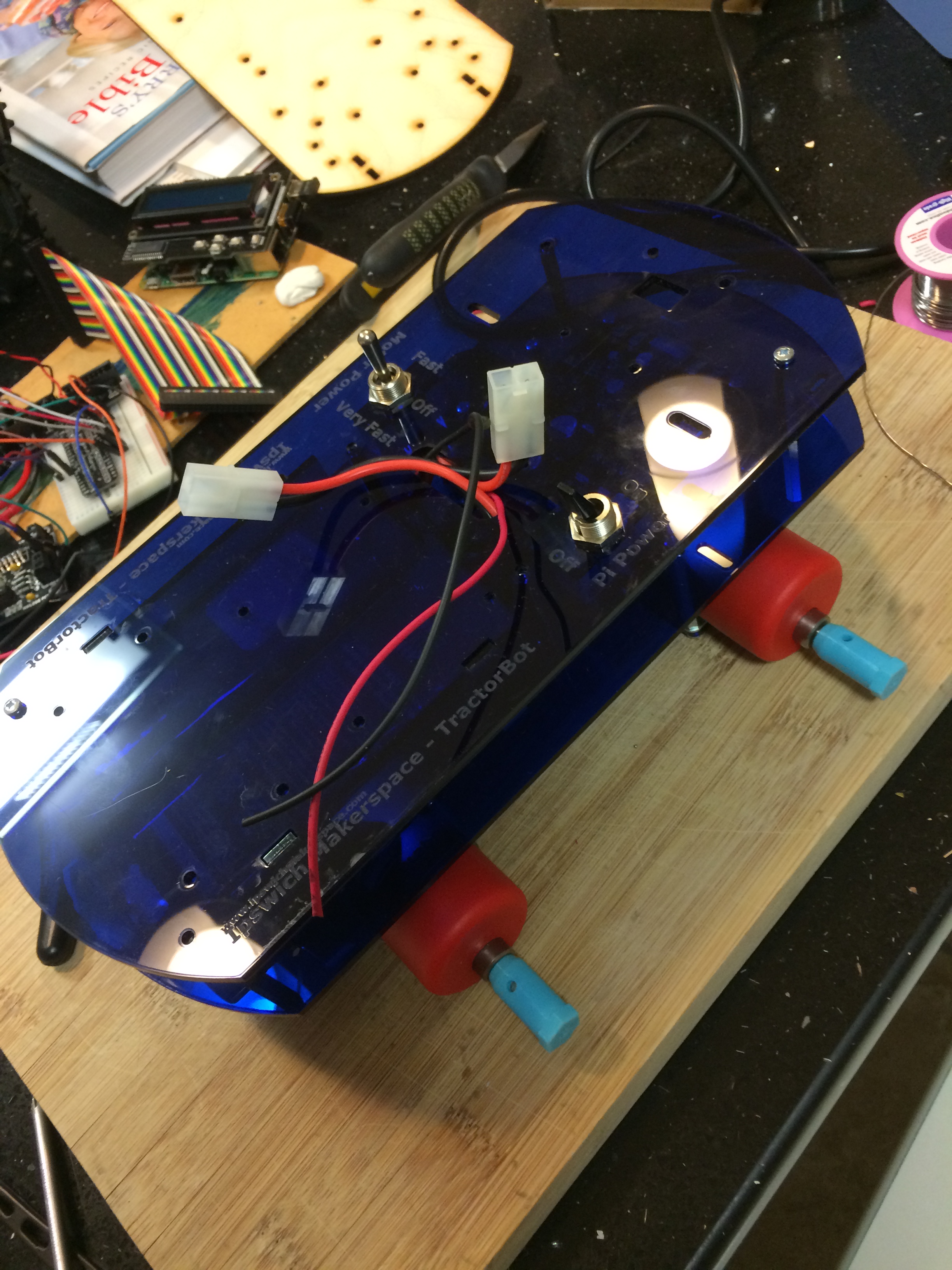
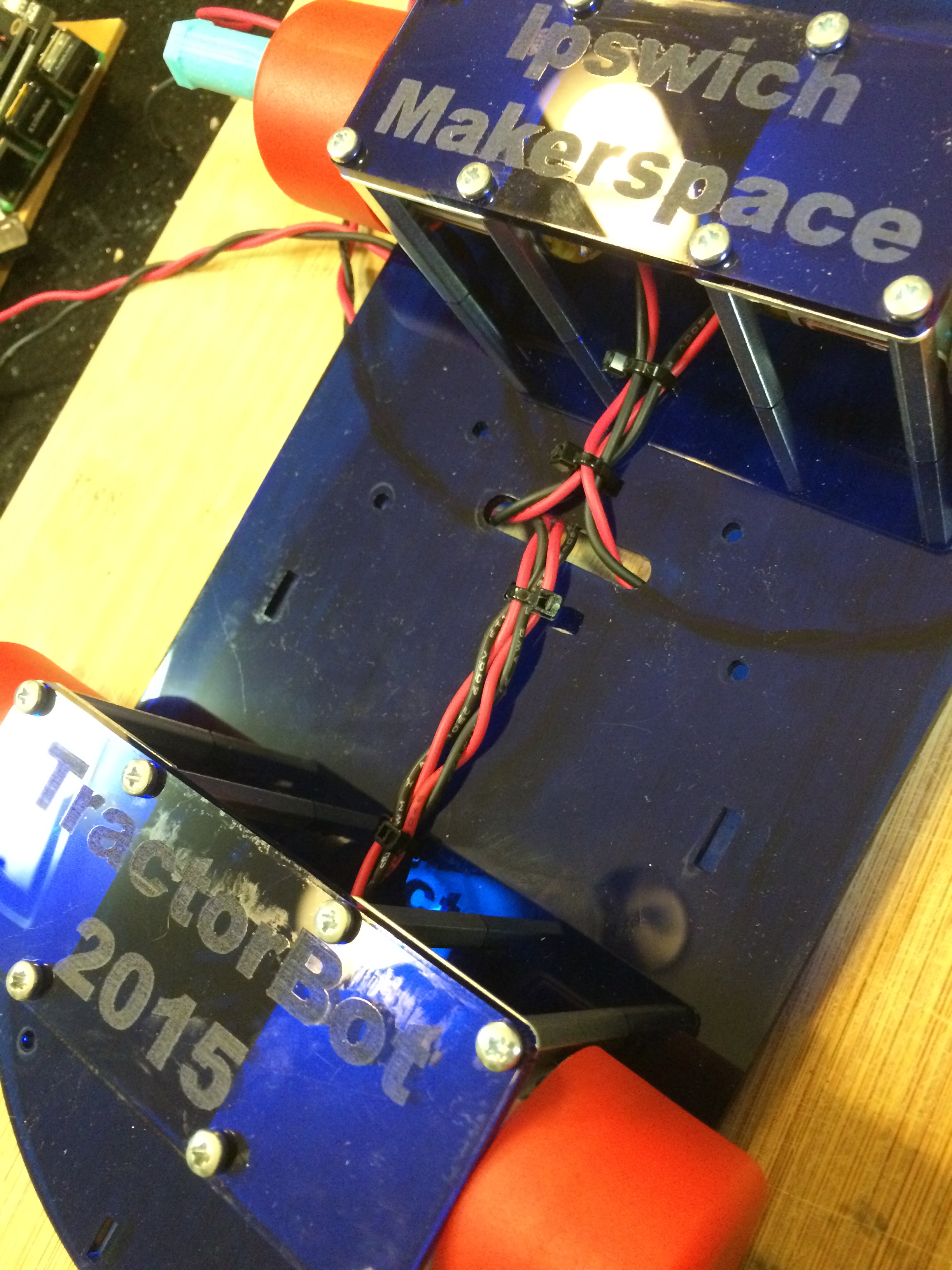
The almost completed robot
-

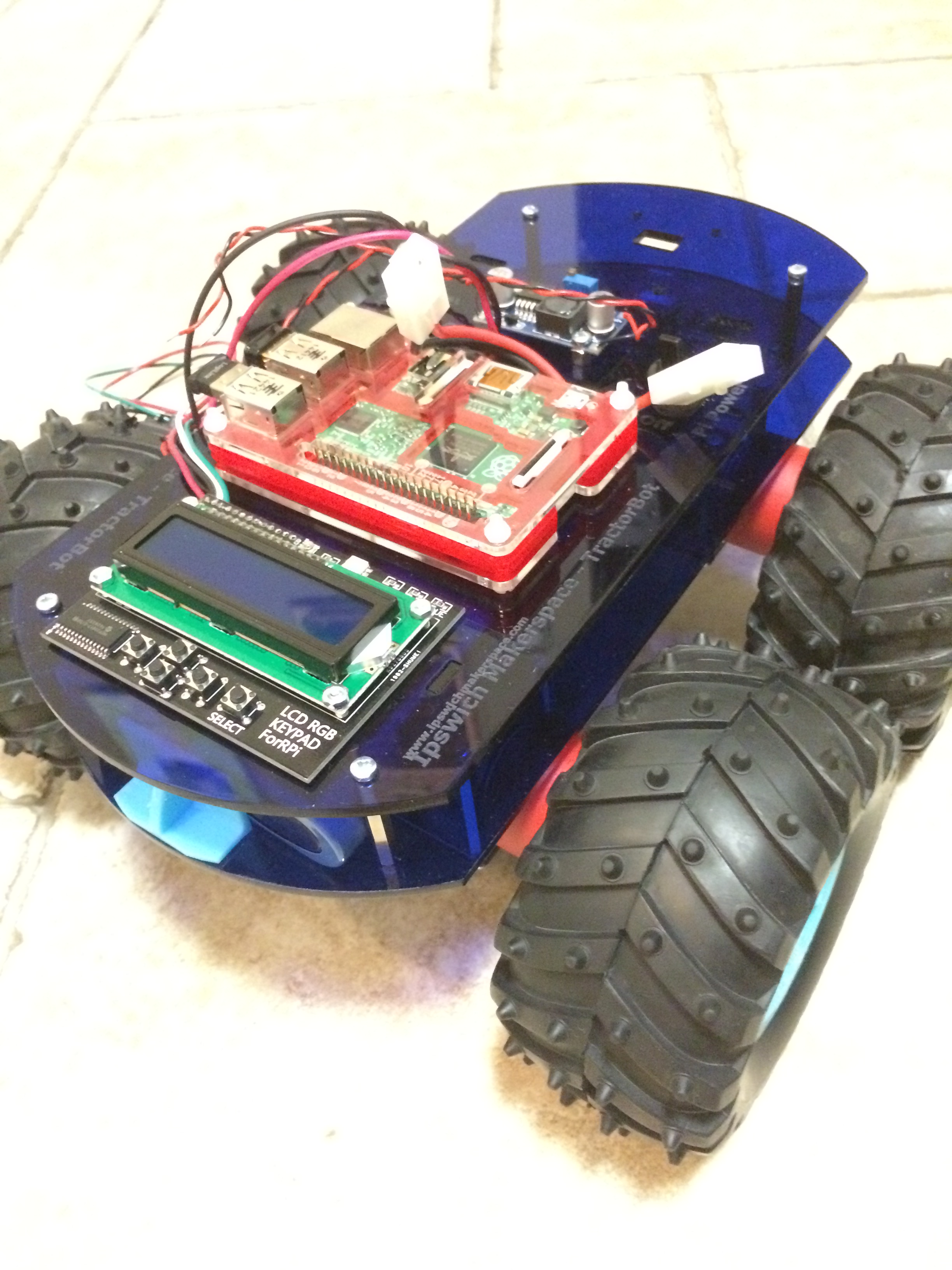
- Display, Pi and DC-DC convertor added
-

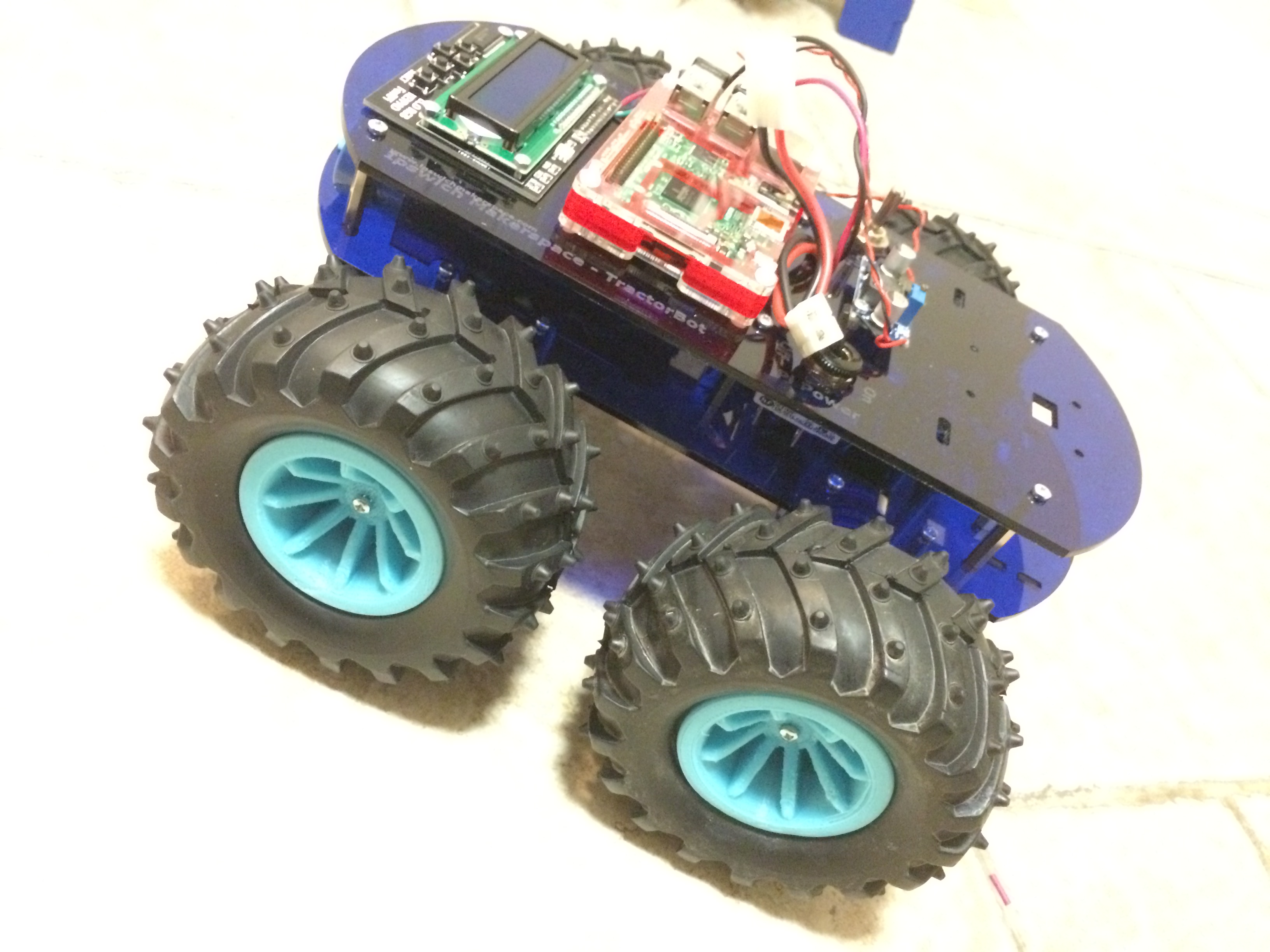
- More or less complete
-

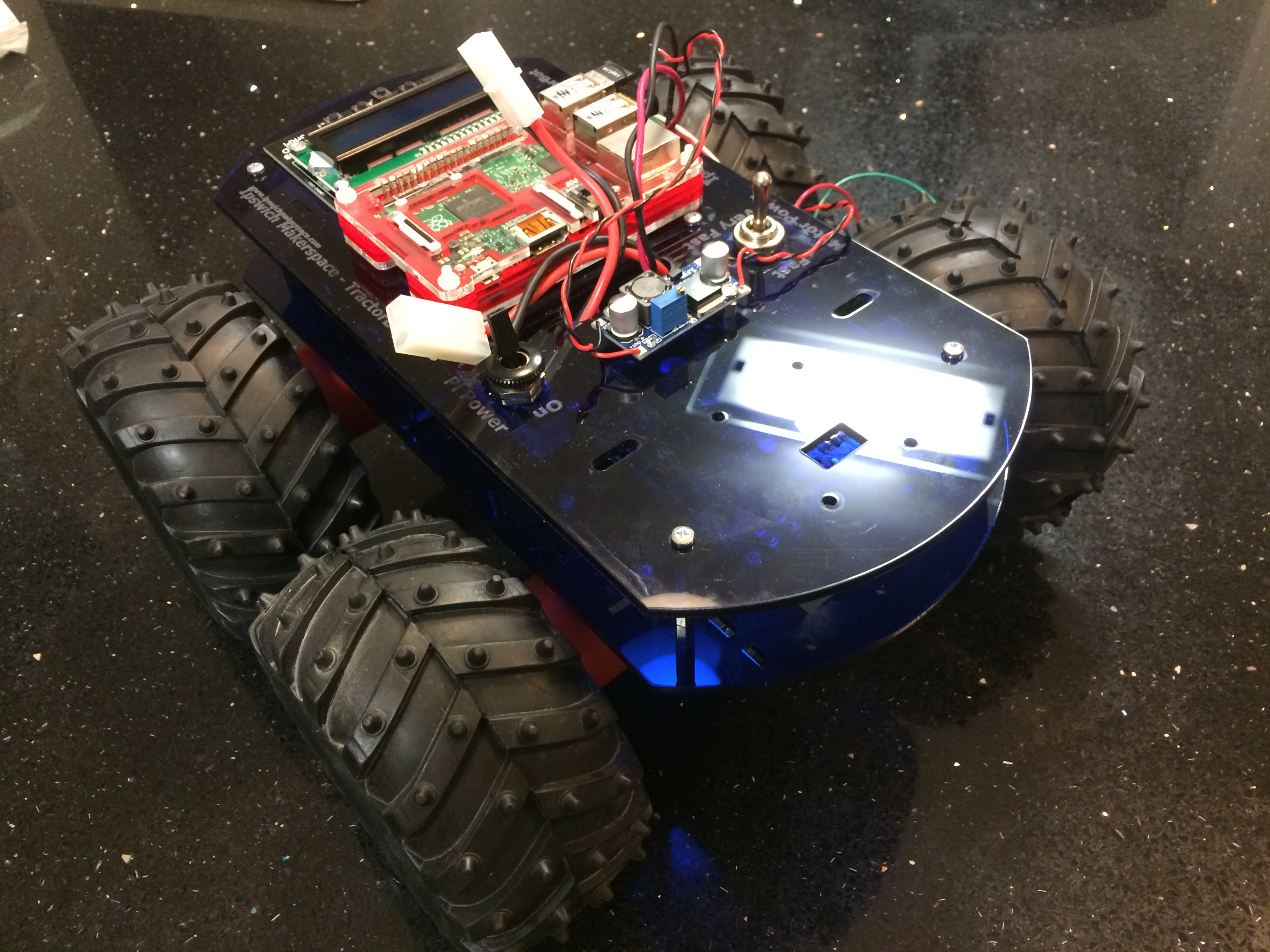
- Looking awesome
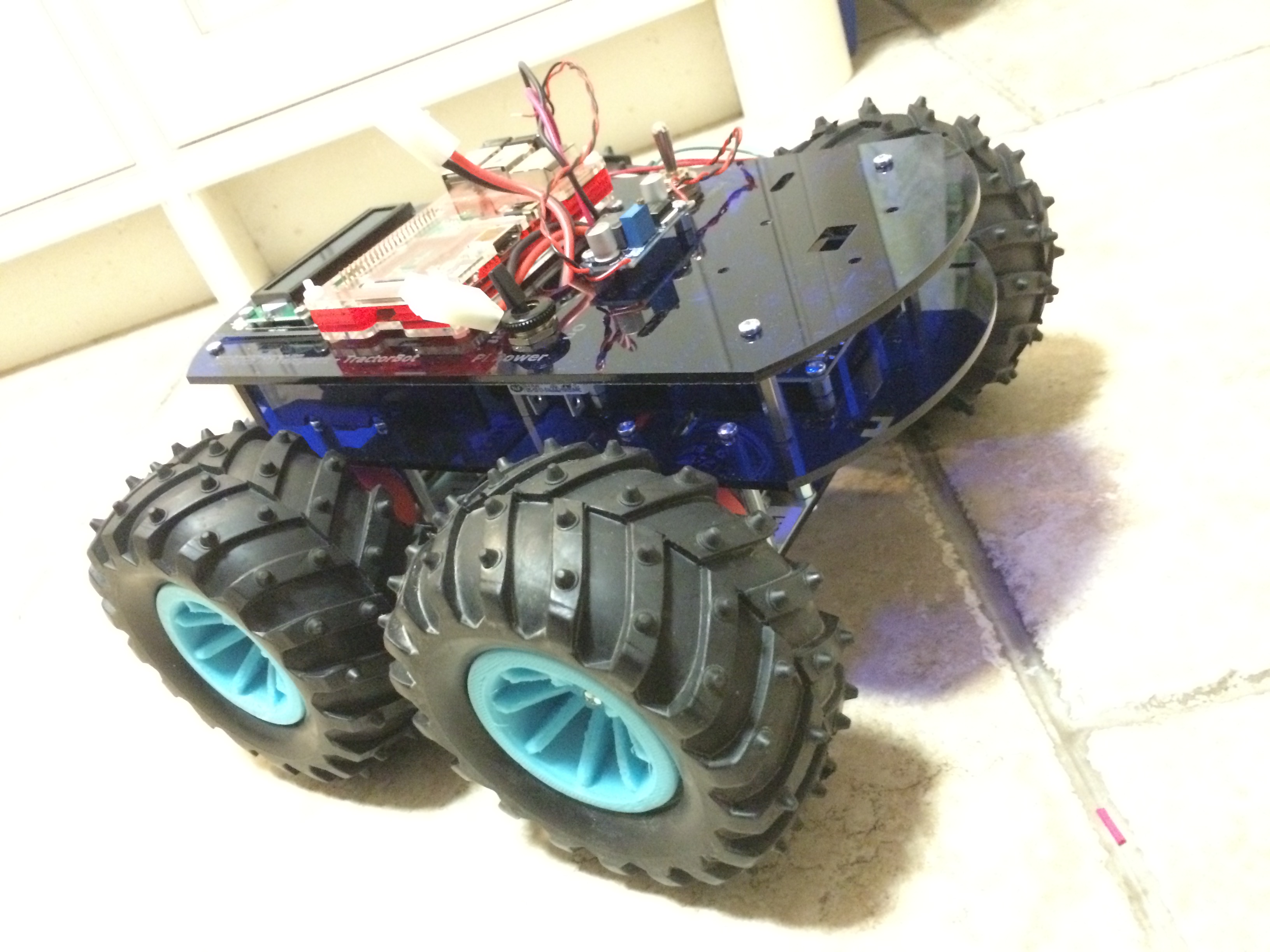
Also going on this week, Jon has been working with the Hall Effect sensors and has created a library so the Pi can read the sensors via an Arduino Pro Mini clone. Along with this he has also been working on some PID (proportional, integral, derivative) code to allow TractorBot to drive in a straight line along with navigating the three point turn course. Jon just needs to tune it now so that it works with the competition bot seen above.
Phil has been fine tuning the line following code, but once again this really needs to be tuned on the competition robot.
Things that still need to happen. The robot has not moved yet, we are awaiting delivery of a couple of PCB’s, one to mount the line follow sensors and the second is the main interface board which hooks everything together. Hopefully these will be arriving today and maybe tonight TractorBot will move!
Keith also needs to convert the trial skittles ball launcher to fit the new robot and get the bits laser cut by Phil, the wire holder for the Pi Noon challenge needs to be designed and 3D printed, as do the wheel hub magnet mounts. Lots to do, now where is that Red Bull!