
So for the second year we intend to run the robot as a Wifi access point to allow us to connect via ssh and check/debug Tractor Bot. Phil was a bit concerned that the Pi 3’s radio could not run as an access point however he came across this handy guide and we can now connect either to the Pi as an access point or allow it to connect to any of the Wifi networks it knows about.
https://frillip.com/using-your-raspberry-pi-3-as-a-wifi-access-point-with-hostapd/
It works really well and means that Tractor Bot can be run headless very easily.
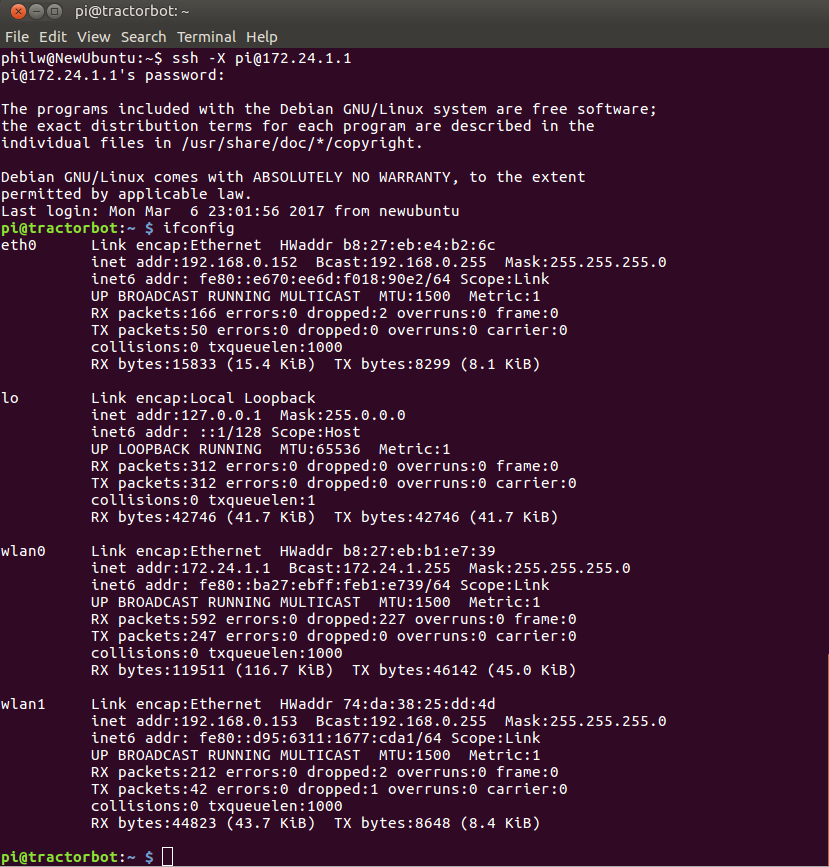
Multiple wireless interfaces
Pi supporting two wireless interfaces, one using the internal radio as an access point and one using an external dongle bound to Phil’s router. Not to mention a hard line to the same network.