
Introducing Jon Leach, team member
Keith Ellis : October 23, 2015 11:50 : PiWars 2015Jon started out with computers when a family friend gave him an old MS-DOS machine in the early nineties. From there a string of different types of hardware, including many home built machines, quickly showed that Jon was destined for a career in computing.
 Starting with web site development using HTML and CSS Jon quickly progressed onto JavaScript, PHP and then Java. It was around this time that Jon began studying electronics at school and that sparked an interest in computer control and automation of real world objects.
Starting with web site development using HTML and CSS Jon quickly progressed onto JavaScript, PHP and then Java. It was around this time that Jon began studying electronics at school and that sparked an interest in computer control and automation of real world objects.
In 2004 Jon started a course studying Computer science at the University of Southampton. This introduced him to a whole host of new technology included object oriented development, linux and c/c++.
In 2008 Jon moved to Ipswich and started a job at BT in Ipswich as a software engineer working at the one small part of BT that actually works on the phone network. Currently he works developing SIP soft switches for large corporate customers.
Despite his day to day focus on software Jon has continued his interest in hardware and electronics. Home automation is a particular focus of his spare time but also robotics, 3D printing and multi rotor aircraft.
Jon is the Ipswich Makerspace webmaster, has been involved in organising the first Ipswich Raspberry Jam and gives talks at several local tech groups.
Joining the tractor bot team for this year Jon is focusing on adding additional sensors to further tune to robots performance in the various challenges.
TractorBot prototype lives
Keith Ellis : October 21, 2015 11:50 : PiWars 2015Last week Keith was scrabbling around in his shed to find a piece of hardboard to mount motors, motor drivers and Pi etc. Well it turns out he found some, so he knocked together a quick TractorBot prototype, the results can be seen below.
-

- Found some hard board
-

- Laser cutter is out of action so Keith gets out the knife
-

- We have a chassis
-
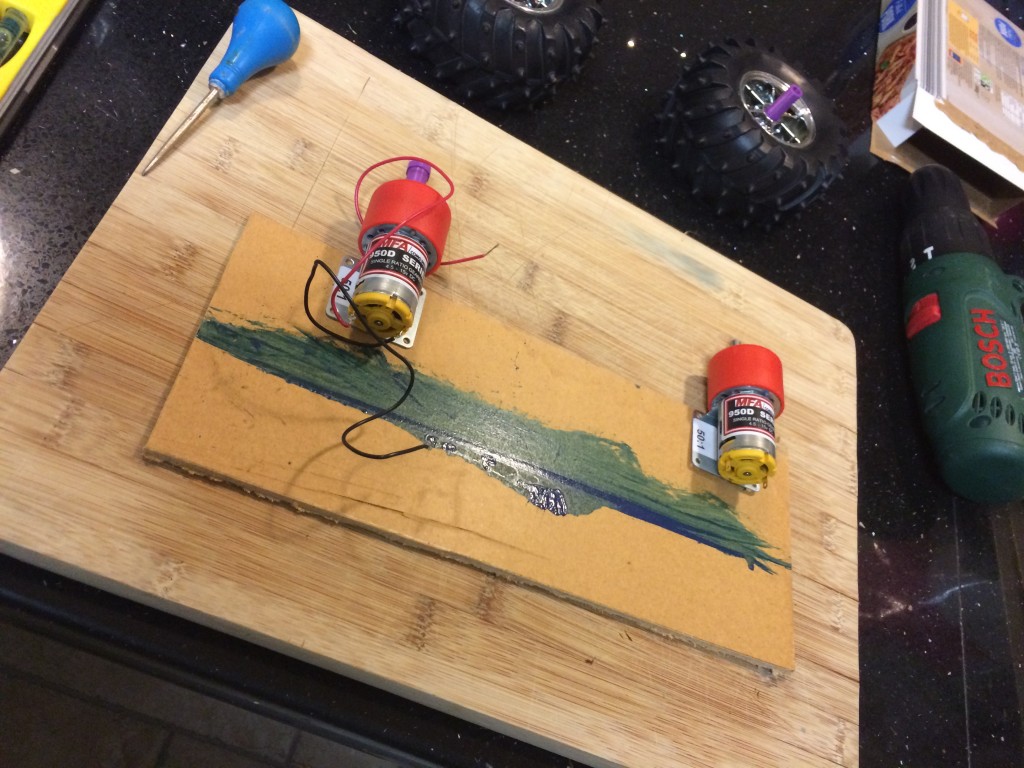
- Layout the motors
-
- Bolting motors on
-
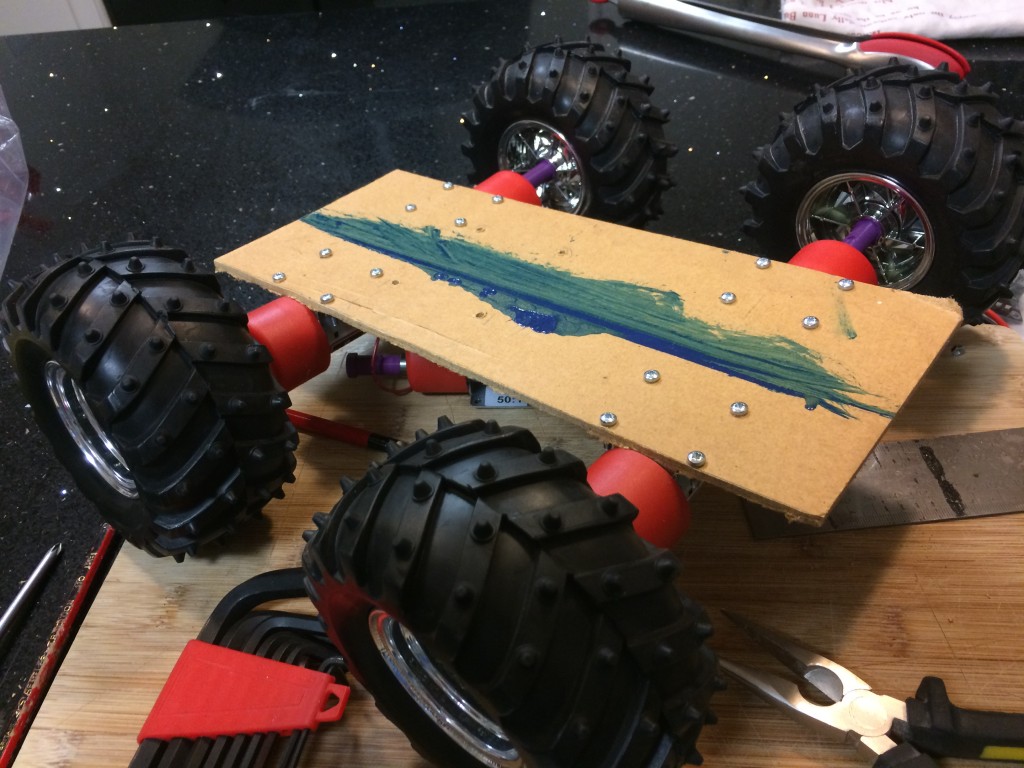
- Starting to look like a robot now
-
- Lets solder some wires onto those motors
-
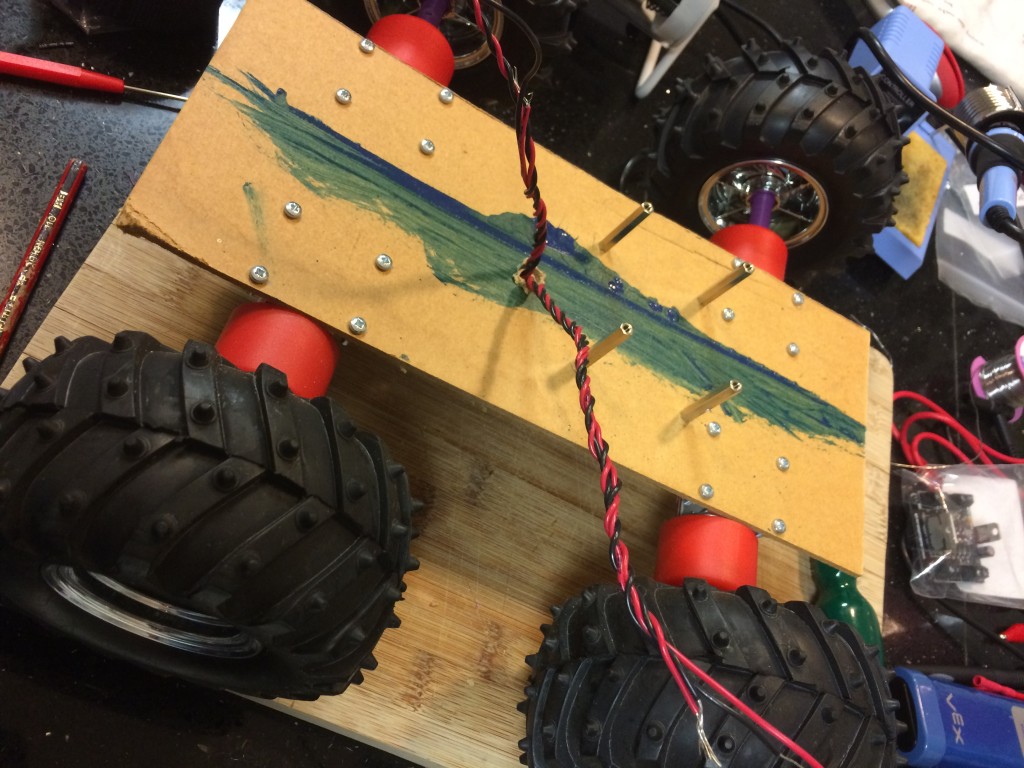
- Thread the wires through
-
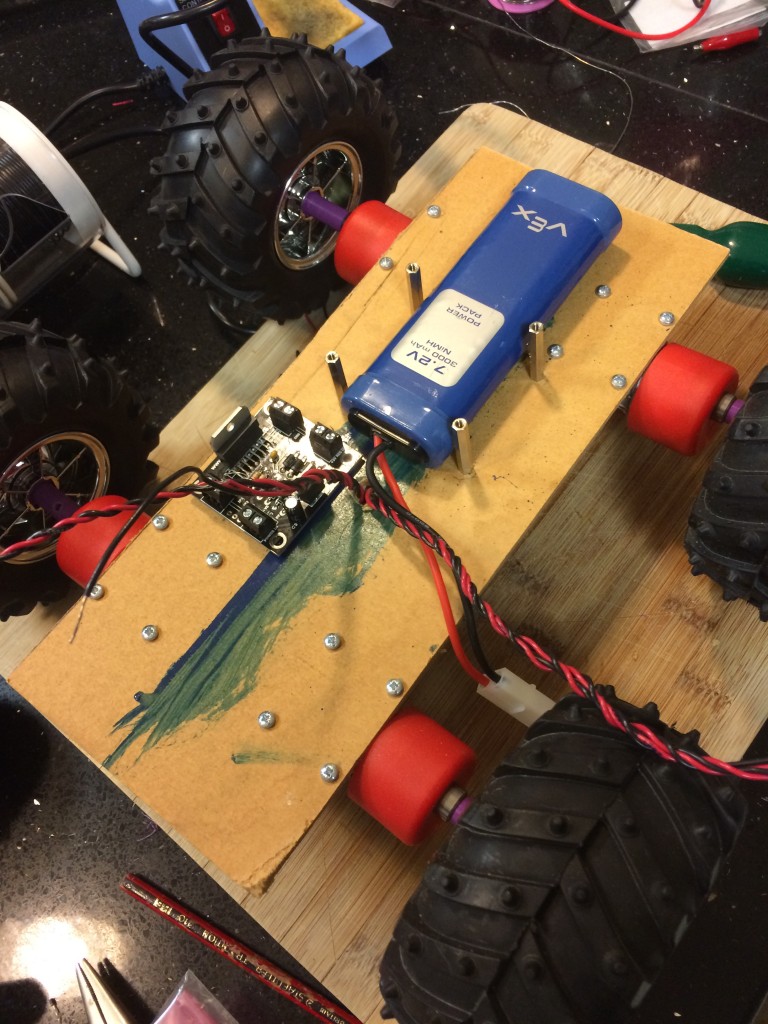
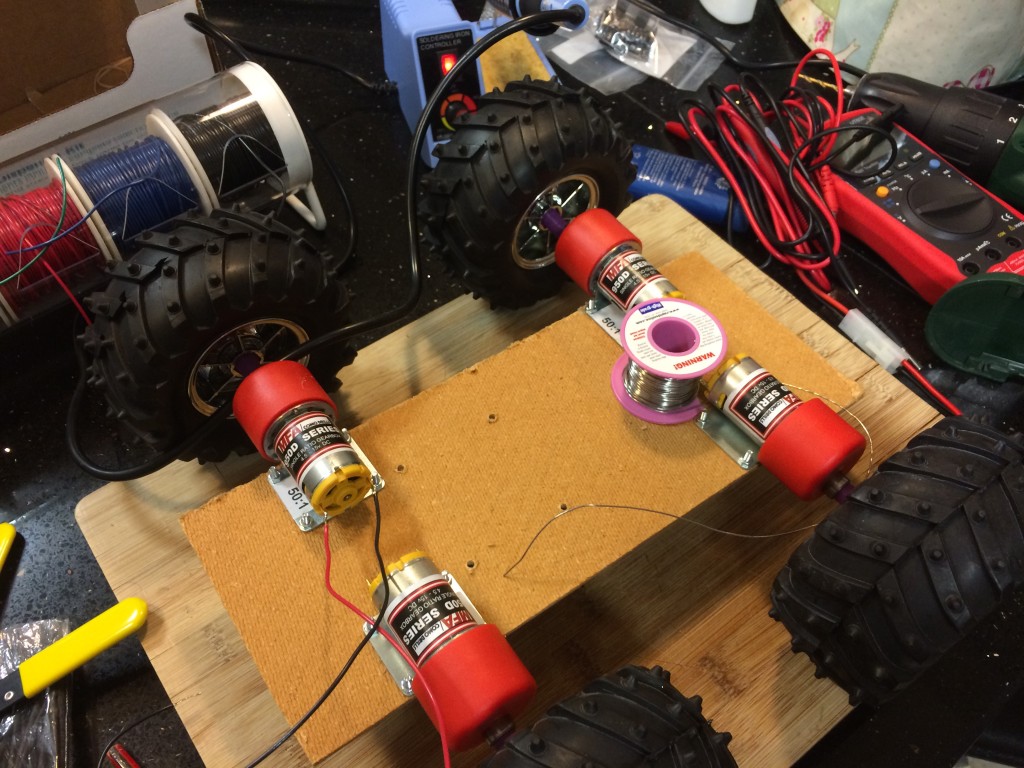
- Layout the motor drivers and battery
-
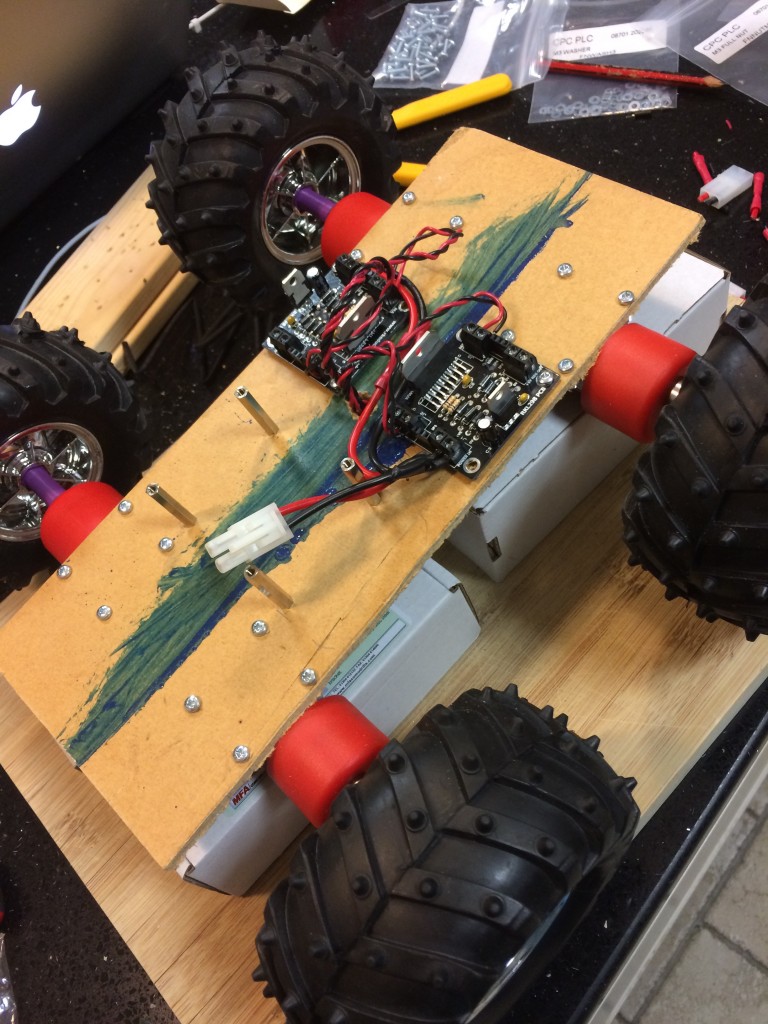
- Fix the motor drivers
The next thing to do was to download the latest Raspbain Jessie image and flash it to a new SD card. Keith had trouble with unzipping the download, but a quick check on the Raspberry Pi website showed that if the file was unzipped with The Unarchiver for Mac it would unzip fine, and it did. So after a quick dd command the SD card was flashed and the Pi was up and running.
Keith then pulled the BitBucket repository to the Pi, installed the dependencies and fired up TractorBot.
TractorBot 2015 prototype first test from Keith Ellis on Vimeo.
Ooops, it didn’t work. It turned out that the motor driver earth was not connected to the Pi earth, once another jumper wire was installed it all worked as expected. So Keith tidied it up a bit, fixed all the components down and ran a side by side comparison against last years robot.
TractorBot 2014 meets TractorBot 2015 from Keith Ellis on Vimeo.
So now we know the motors and motor drivers work the next few weeks will be designing a proper chassis, this time hopefully it will be small enough to fit into the A3 category.
Introducing Keith Ellis, team member
Keith Ellis : October 14, 2015 11:50 : PiWars 2015Keith Ellis was at school in the age of the Sinclair ZX81 and the ZX Spectrum. He remembers getting home from school in the afternoon and setting up his dads ZX81 on a table, plugging it into the kitchen black and white TV and typing in lines of code from magazines onto the absolutely awful “touch” keyboard. He was lucky enough that his dad had also purchased 16K RAM expansion pack which upgraded it from the standard massive 1 Kilo Byte of RAM. The only issue being if you pressed the “touch” keys too hard the ram pack moved, the computer crashed and code had to be retyped from the beginning.
From this point on he was always drawn to computers, moving from the ZX81, through various versions of the ZX Spectrum, Atari ST (he remembers a day trip to Selfridges in Oxford Street with his dad to get hands on before buying), then onto Intel and AMD 386 PC’s.
When it came to choosing his GCSE subjects Keith chose Electronics as one of them, he enjoyed this lots and remembers getting the teacher to order all sorts of components to play about with, over and above the official syllabus.

Keith is the old(er) one
However on leaving school Keith decided to take a BTec in Construction and later completed a BEng (Hons) in Civil Engineering and years later has now completed many successful projects including Portcullis House in London opposite Westminster Tower (Big Ben) and more recently London Gateway Port in Essex.
Over the years Keith had kept his interest in computers, although more as a user rather than a developer, he tried several times to self teach himself programming, buying several books on programming in C, although he made progress there was never any real reason or need to develop anything so it fell onto the back burner. Later the iPhone was announced, Keith applied for a developer account, downloaded the tools and bought more books on Objective-C, but once again, there was no real need, so it fell to the back burner again.
Then in April 2013 Keith ordered his first Raspberry Pi, at first he was not sure what to do with it, it was initially set it up as a media server using RaspBMC which was good, but he wanted to do more. After a bit of Googling, around November 2013, Keith decided he would build a Raspberry Pi robot. He wanted to build it from scratch and get back into electronics, so rather than buy a motor controller add on board, he bought a bread board, motor controller chip (L293D) and some wires and started messing about with LED’s, motors and Python. At last he had a project to get his teeth into and at last could progress his coding (and electronics) skills.
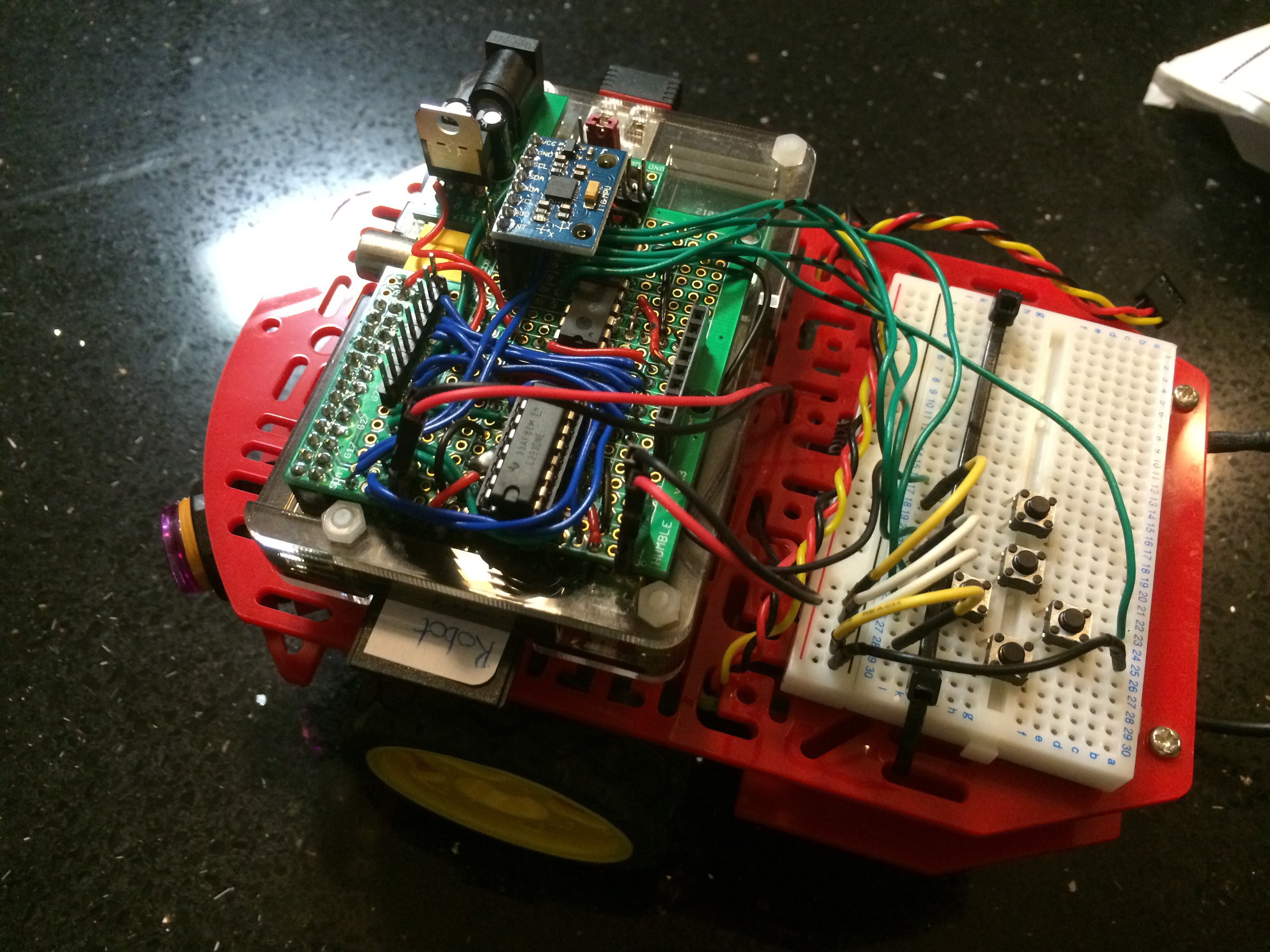
PiBot just keeps growing
The robot is still work in progress, it now boasts a L293 motor driver, Nokia 5110 display, IR proximity sensors, MCP23008 I2C IO expander, buttons and an I2C gyro and accelerometer and bluetooth interface for Wii controller. Progress was halted on this project towards the end of last year to work on TractorBot, the Ipswich Makerspace entry for PiWars 2014. He does still continue to learn and tinker with the original robot and the LCD menu system is now operational.
Keith is very much looking forward to this years PiWars, last year was such a blast and the community spirit surrounding the event was amazing.
TractorBot 2015 is born
Keith Ellis : October 13, 2015 13:13 : PiWars 2015Last week we got lots of lovely kit from which TractorBot 2015 will be built. This week we started to put it together, albeit in a bit of a temporary way.
A few things need to be done, the big one is to run the motors up with wheels on so we can measure the stall current, this will then tell us the current the motor driver needs to handle. We have two motor drivers each handle 2 amps per channel, the drivers have two channels each so that gives us a total of 8 amps capacity. Keith is hoping that just one of the motor drivers will do, but until the test is complete we just don’t know.

3D render of hub
To test the stall current of the motors the wheels need to be attached, it is very difficult to stop a motor turning by holding the shaft. The only problem here is the the wheels we have came with a hub attachment for a 3mm diameter motor shaft, the motors however have a 6mm diameter shaft.
Keith quickly drew up a new hub attachment in AutoDesk Fusion 360 and Phil printed them out. The first version worked okay, good enough for prototyping anyway, so Keith attached them to the wheels ready for testing.

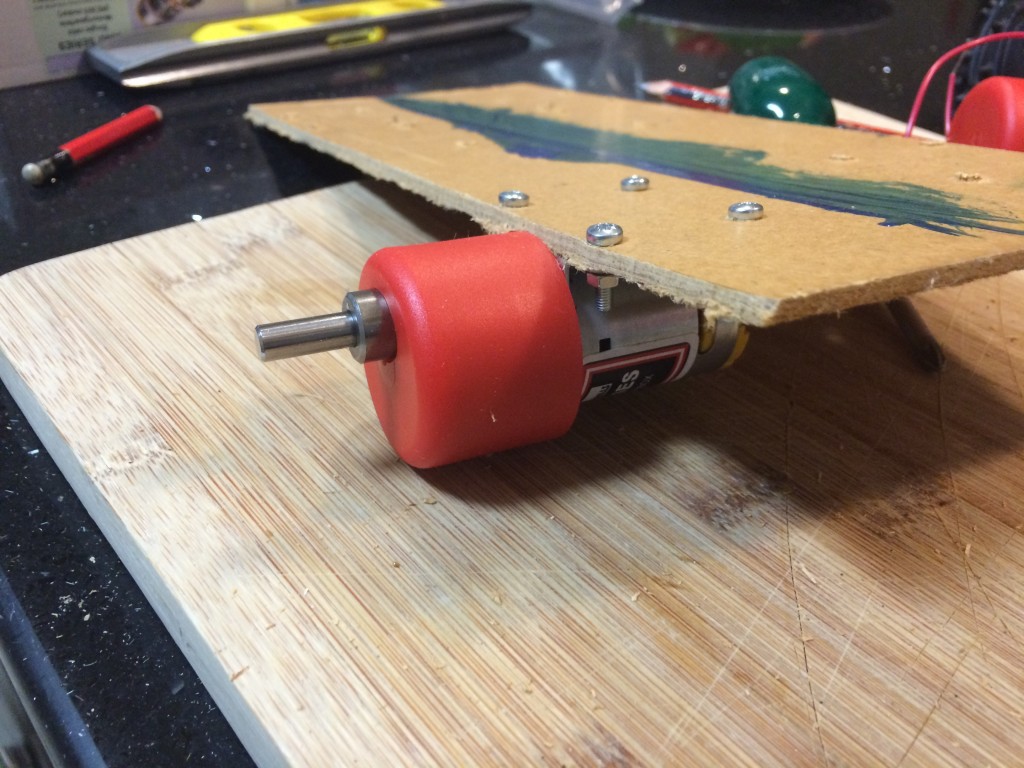
The new 3D printed hub attached to the wheel with the old one for comparison.

Motor with hub adapter fitted
The new hub also fits the motor like a glove, maybe a bit too well (read, Keith cannot remove it). Now the wheels are attached to the motors, Keith will dig around in his shed to find a sheet of hardboard to use as a chassis plate. The motors will be fitted and then proper testing can commence.
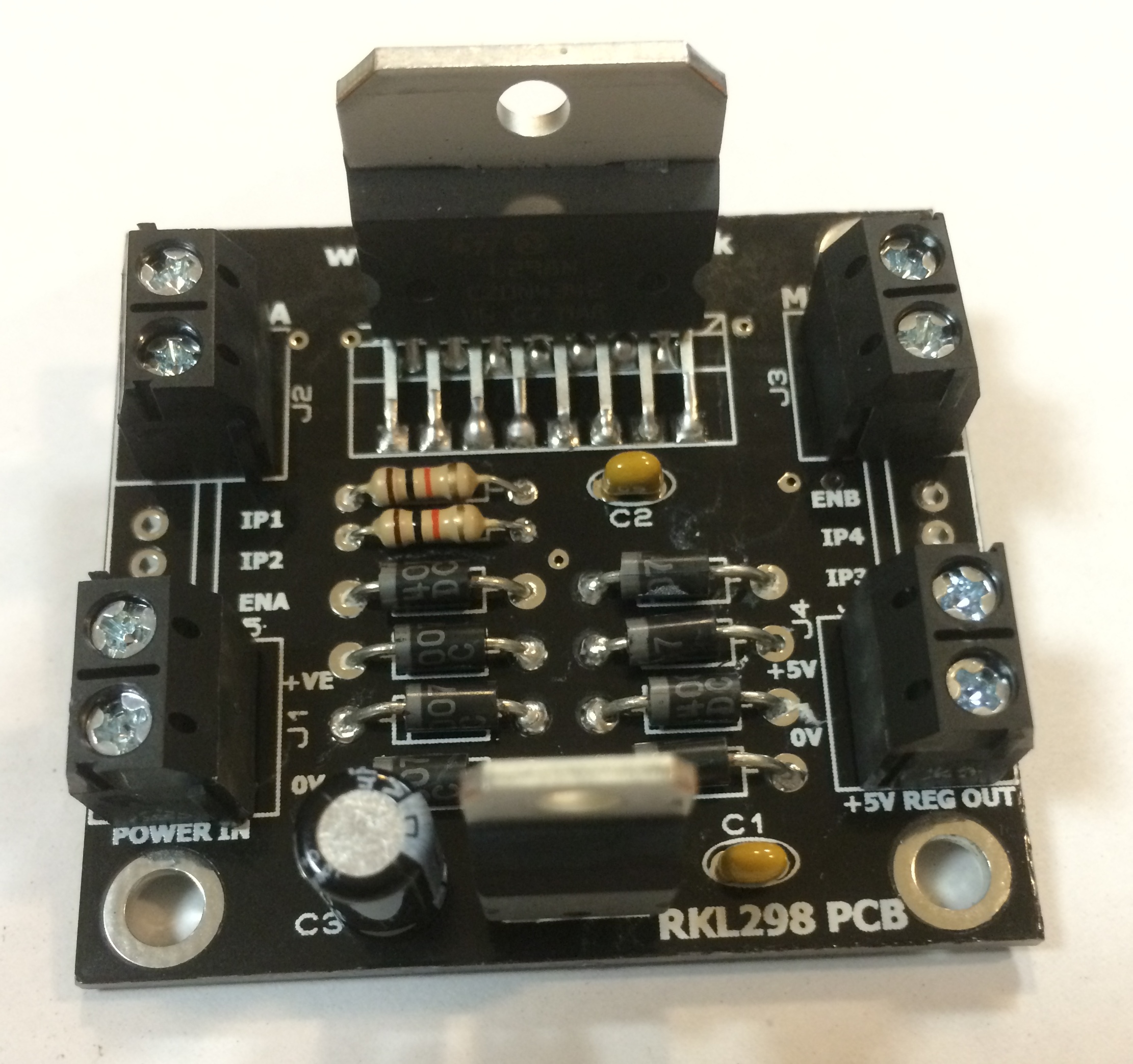
One or two of these motor drivers will be required
Further tasks required are as follows:
- Confirm the stall current for the motors, thus determine the number of motor driver to use
- Fit batteries, Raspberry Pi and motor drivers to the chassis plate
- Run some basic code, probably in Python, to check the robot moves and confirm how fast it is
- If robot is too slow running at 7.2v, try at 14.4v
- Design proper chassis plate
etc, etc………
So much to do.
Swag
Keith Ellis : October 9, 2015 21:34 : PiWars 2015Well, we had a lovely surprise last night at the Makerspace. In the preceding week we had put a wish list together of kit for TractorBot and last night Rapid Electronics came good and a swag bag full of lovely kit was delivered.
We have Raspberry Pi’s, cases, wire, connectors, cobblers, magnets, motor drivers, motors and wheels(on back order). We are very lucky and grateful to Rapid for their generous sponsorship.

Rapid Swag
After struggling to choose the motors we were very keen to give them ago, so out came the soldering iron and soldered on a couple of wires to one of the motors. We had high expectations as we pushed the wires directly into the 7.2v battery terminals. But as the 50:1 ratio motor started to turn our excitement quickly turned to disappointment, it was slow, very slow. So this year we may well be running TractorBot at 15 volts to get a bit of extra speed.
It turns out those generic yellow robot motors are not actually that bad.