
Local Nerds Challenge Cambridge
Steve Chalkley : April 3, 2017 17:54 : PiWars 2017A local team of robot builders from Ipswich Makerspace took second place in the Cambridge PiWars competition at the weekend. They entered the Professional category in the prestigious robotics event, a challenge-based robotics competition in which robots created by teams compete in various non-destructive challenges. The Makerspace’s team competed on Sunday and got off to a rocky start getting knocked out of the Pi-Noon robot duel in the first round despite some skilful moves by the driver Jon Leach. They also had issues with the bright sunlight on the course for the Maze and Speed challenges. In training the robot had operated flawlessly under artificial light but the sun interfered with the sensors on the day. The team quickly recovered with an excellent run on the autonomous Line Following and a blistering time for the Crazy Golf with Phil Willis in control. A solid performance on the grinding Obstacle course boosted the team’s morale no end. The final challenge was to present the robot to be judged by Dr Lucy Rogers one of the judges from recent series of Robot Wars. Under Dr Rogers’ critical eye the team explained the highlights of their design helped by Phil’s 10-year old daughter Amy.
The team captain Keith Ellis said “It’s amazing what we were able to achieve with modern technology. Parts were laser cut and 3D-printed, we had custom circuit boards made and we even made use of Open Source computer vision software; 10-years ago we couldn’t have built this robot”.
Steve Chalkley from Ipswich Makerspace said “This was our third PiWars and we’ve been in the top three in each one. We’re very proud of our team and grateful to Rapid Electronics in Colchester for their sponsorship. It allows us to be more adventurous with our designs and produce winning robots”.

About the image:
Left to right: Keith Ellis, Dr Lucy Rogers (Robot Wars), Phil Willis (Amy’s Dad), Jon Leach. Front Amy Willis and Harrison Ellis (holding the trophy backwards, bless).
Background:
Dr Lucy Rogers is a chartered engineer, who appeared as a judge in the two most recent series of Robot Wars. She is a Chartered Engineer, Fellow of the Institution of Mechanical Engineers, the Royal Astronomical Society, and the British Interplanetary Society. Her current projects focus on reducing the damage from space debris. At the PiWars weekend Dr Rogers judged the technical and innovation elements of each team’s robot.
PiWars
Pi Wars is a challenge-based robotics competition in which Raspberry Pi-controlled robots are created by teams and then compete in various non-destructive challenges to earn points. There are prizes awarded at the end of the event. At the weekend teams from schools, families and groups of hobbyists competed for two full days of robotic fun and games. Pi Wars took place in Cambridge, UK and was open to anyone from around the world. This year there was even a team from the USA. It is run by the same team that organises the Cambridge Raspberry Jam.
Ipswich Makerspace
The Makerspace is a collaborative workshop and community space for creative people to work, gain new skills and inspire each other. After three years of hard work the group now has its own premises in Dove Street which they are filling with high and low tech tools for budding makers. They organise a range of activities such as the regular Thursday project night. The team from the Makerspace has entered all three of the PiWars competitions winning one and coming second in the other two, a fantastic achievement given the level of the opposition. (Website: www.IpswichMakerspace.com)
Raspberry Pi
The Raspberry Pi Foundation was launched in 2008, in order to endorse and develop the Pi. On February 2012, the Raspberry Pi 1 Model B launched at just £25, and offered a 700MHz processor, 512MB of RAM, two USB ports and a GPU capable of 1080p display – all in the palm of your hand. Recent Raspberry Pi sales figures show that the humble board is, in fact, the world’s third best-selling general purpose computer after the Mac and PC. Raspberry Pi achieved this milestone by selling north of 12.5 million boards in five years. This figure beats the previous third place holder, the Commodore 64. What seems like a simple creation went through an arduous journey on its way to becoming the best-selling UK-developed computer in history. (Source: www.raspberrypi.org)
Pi Wars 2017 – Radio Ga Ga
Phil Willis : March 24, 2017 23:29 : PiWars 2017So for the second year we intend to run the robot as a Wifi access point to allow us to connect via ssh and check/debug Tractor Bot. Phil was a bit concerned that the Pi 3’s radio could not run as an access point however he came across this handy guide and we can now connect either to the Pi as an access point or allow it to connect to any of the Wifi networks it knows about.
https://frillip.com/using-your-raspberry-pi-3-as-a-wifi-access-point-with-hostapd/
It works really well and means that Tractor Bot can be run headless very easily.
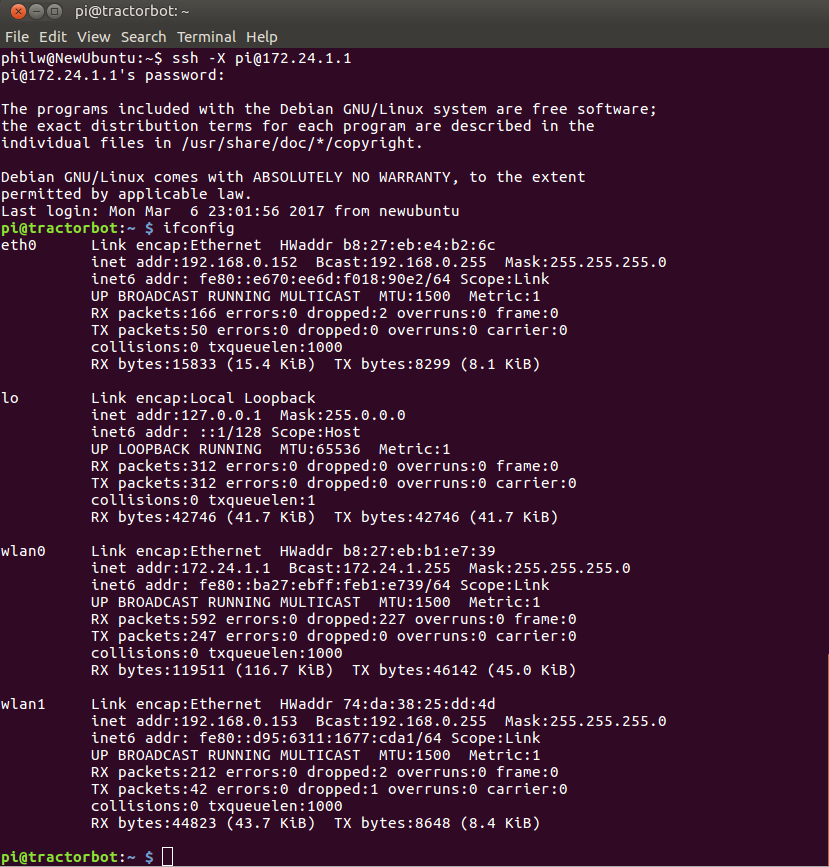
Multiple wireless interfaces
Pi supporting two wireless interfaces, one using the internal radio as an access point and one using an external dongle bound to Phil’s router. Not to mention a hard line to the same network.
Pi Wars 2017 – More Panic
Phil Willis : March 20, 2017 08:51 : PiWars 2017So we now have all the challenges bar the golf sorted, which Keith is working hard on.
A sort of inverted Egg Cup.
Jon is taking care of the leads required for the final design and Phil is going to be cutting the perspex for the body.

Need a bigger laser!
We need a bigger laser and more hours in the day…
Pi Wars 2017 – Amazing maze!
Phil Willis : March 12, 2017 14:02 : PiWars 2017Early on in the proceedings Jon had suggested we build a maze full size for testing (along with twin robots). So armed with wood, glue and screws he built a maze and even made it in bits so that it fit in his car! At least one pair of jeans paid the price due to the very foamy Gorilla glue. Anyway his hard work paid off…..
This is completely autonomous using three ToF sensors.
The small OLED display was working well for each challenge, allowing the operator to select the challenge by way of a small graphic menu. This is it in extreme close-up.

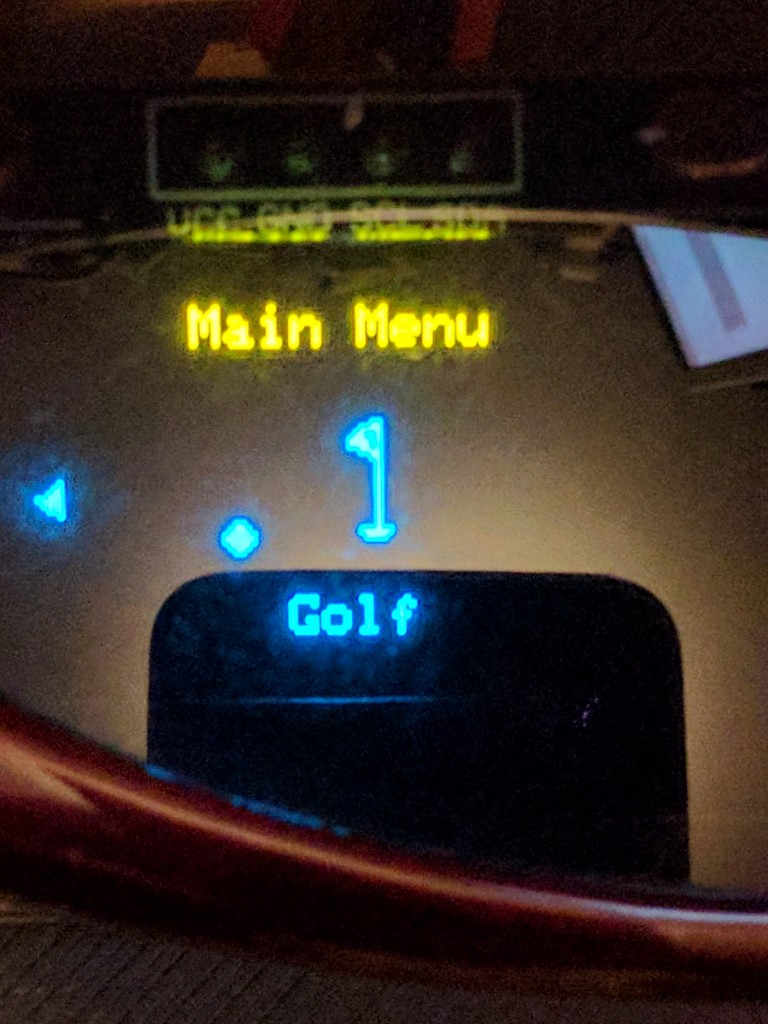
Jon designed a bitmap editor to create the mini icons and then we painstakingly joined the dots. You can find the editor here: https://leachj.github.io/OLED_Pixel_editor/
Pi Wars 2017 – Time to panic…
Phil Willis : March 3, 2017 17:53 : PiWars 2017So with a couple of challenges down and a reasonable remote control we were feeling fairly happy then we realised that we had less than a month to go! The Pi Party had taken out some of our development time so we had to press on. Keith got on with designing a catapult for the skittles challenge.

Skittles Challenge Launcher
Rapid prototyping meant that one email to Phil containing the DXF’s for the laser cutter and the design was being put together for review that evening.

..and in the real world.
But we still had the golf challenge to put together something for…..