Introducing Keith Ellis, team member
Keith Ellis was at school in the age of the Sinclair ZX81 and the ZX Spectrum. He remembers getting home from school in the afternoon and setting up his dads ZX81 on a table, plugging it into the kitchen black and white TV and typing in lines of code from magazines onto the absolutely awful “touch” keyboard. He was lucky enough that his dad had also purchased 16K RAM expansion pack which upgraded it from the standard massive 1 Kilo Byte of RAM. The only issue being if you pressed the “touch” keys too hard the ram pack moved, the computer crashed and code had to be retyped from the beginning.
From this point on he was always drawn to computers, moving from the ZX81, through various versions of the ZX Spectrum, Atari ST (he remembers a day trip to Selfridges in Oxford Street with his dad to get hands on before buying), then onto Intel and AMD 386 PC’s.
When it came to choosing his GCSE subjects Keith chose Electronics as one of them, he enjoyed this lots and remembers getting the teacher to order all sorts of components to play about with, over and above the official syllabus.

Keith is the old(er) one
However on leaving school Keith decided to take a BTec in Construction and later completed a BEng (Hons) in Civil Engineering and years later has now completed many successful projects including Portcullis House in London opposite Westminster Tower (Big Ben) and more recently London Gateway Port in Essex.
Over the years Keith had kept his interest in computers, although more as a user rather than a developer, he tried several times to self teach himself programming, buying several books on programming in C, although he made progress there was never any real reason or need to develop anything so it fell onto the back burner. Later the iPhone was announced, Keith applied for a developer account, downloaded the tools and bought more books on Objective-C, but once again, there was no real need, so it fell to the back burner again.
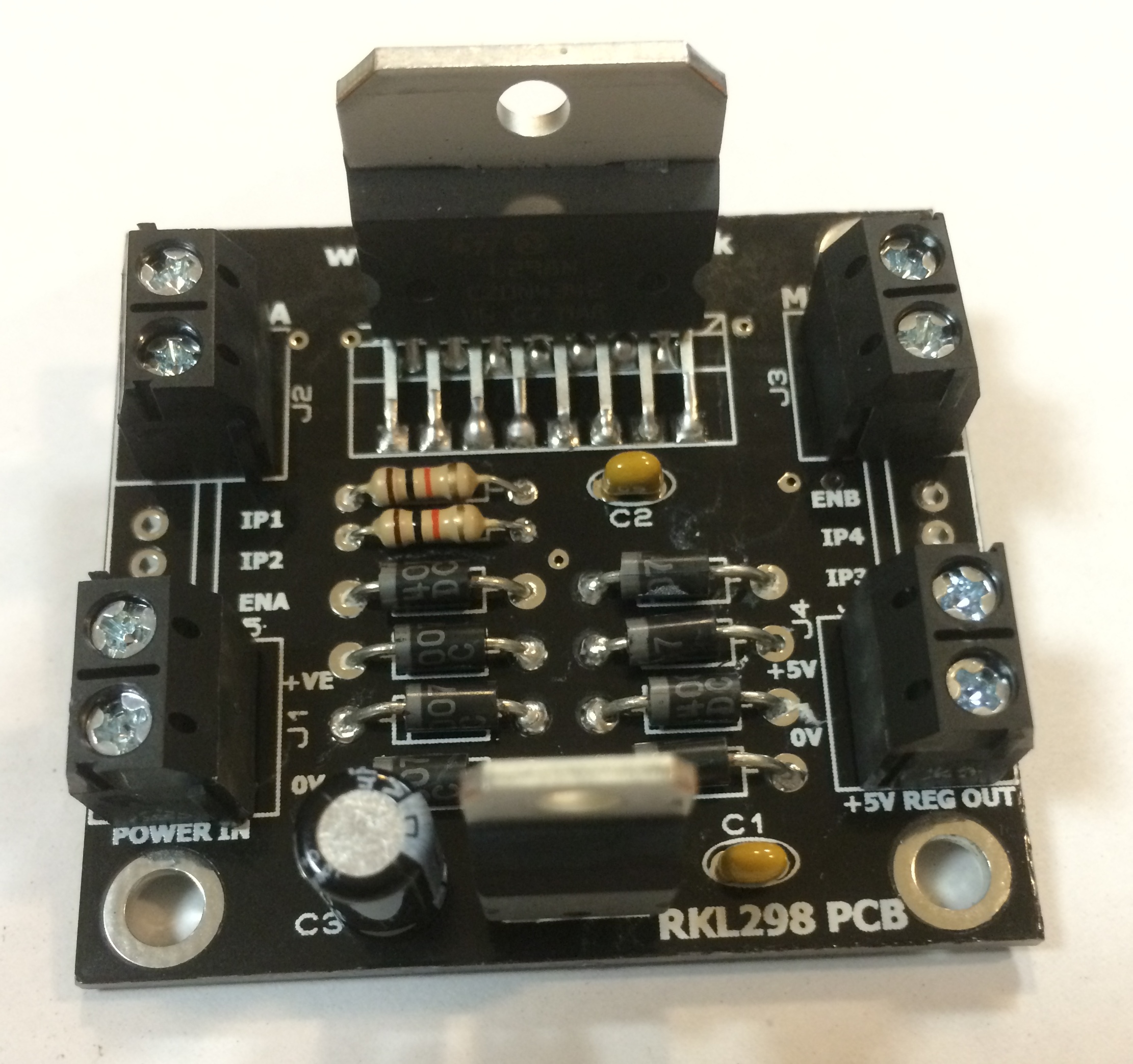
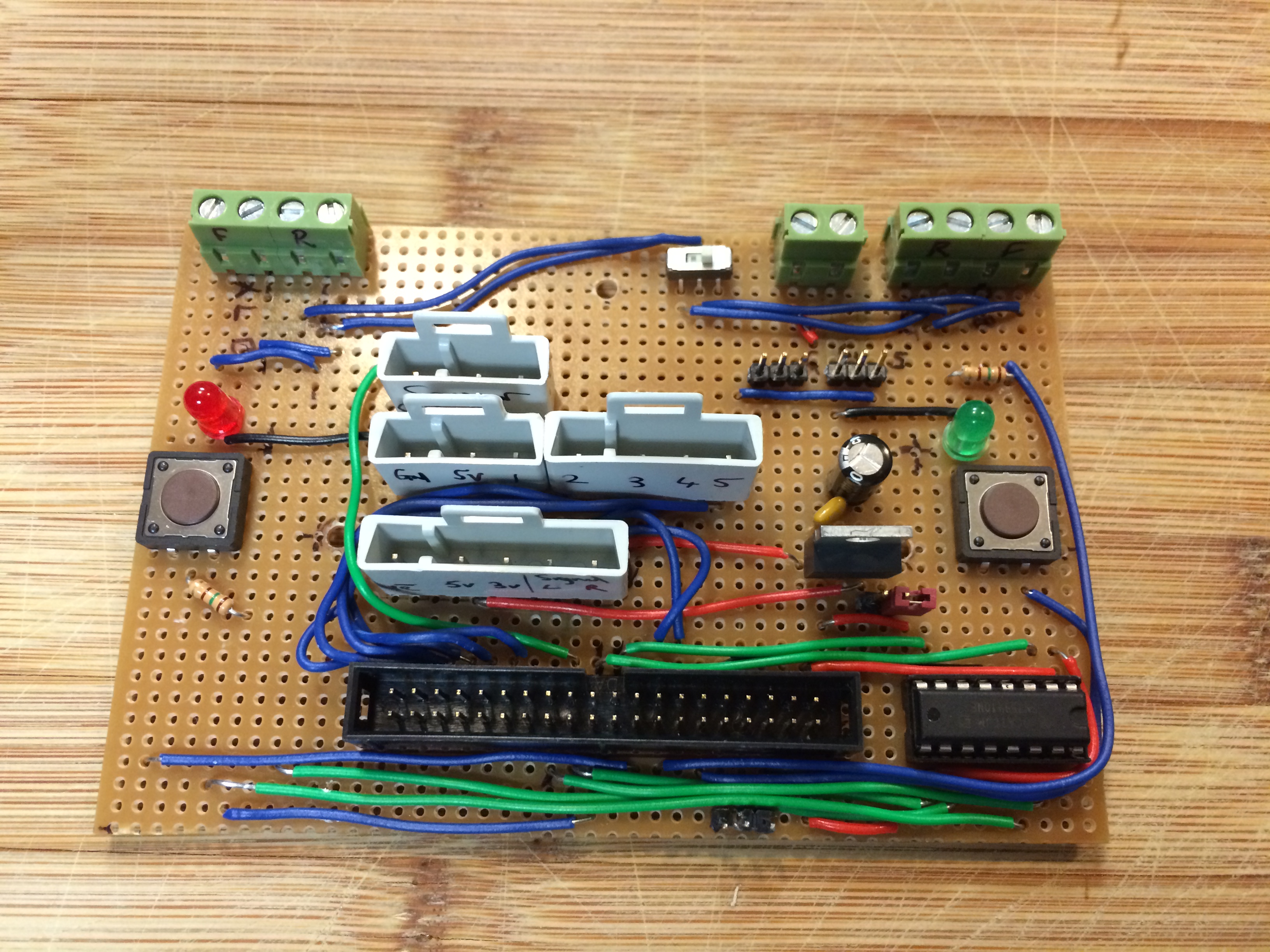
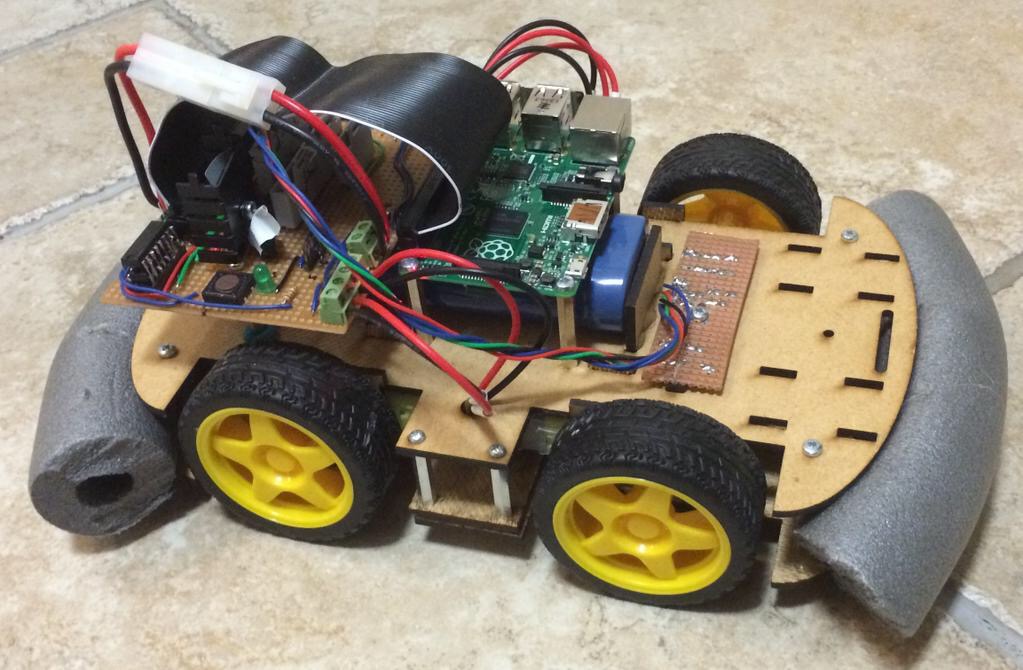
Then in April 2013 Keith ordered his first Raspberry Pi, at first he was not sure what to do with it, it was initially set it up as a media server using RaspBMC which was good, but he wanted to do more. After a bit of Googling, around November 2013, Keith decided he would build a Raspberry Pi robot. He wanted to build it from scratch and get back into electronics, so rather than buy a motor controller add on board, he bought a bread board, motor controller chip (L293D) and some wires and started messing about with LED’s, motors and Python. At last he had a project to get his teeth into and at last could progress his coding (and electronics) skills.
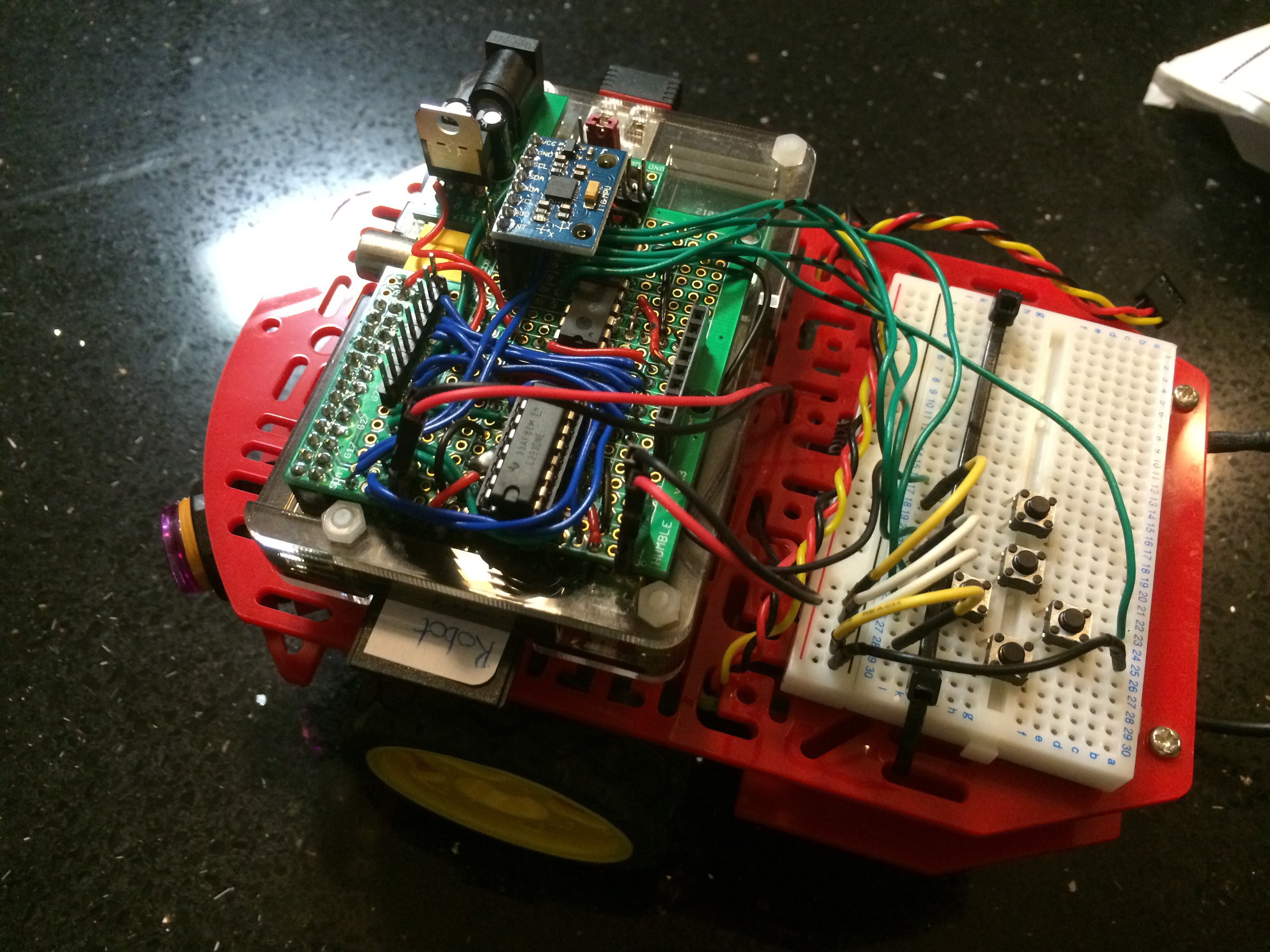
PiBot just keeps growing
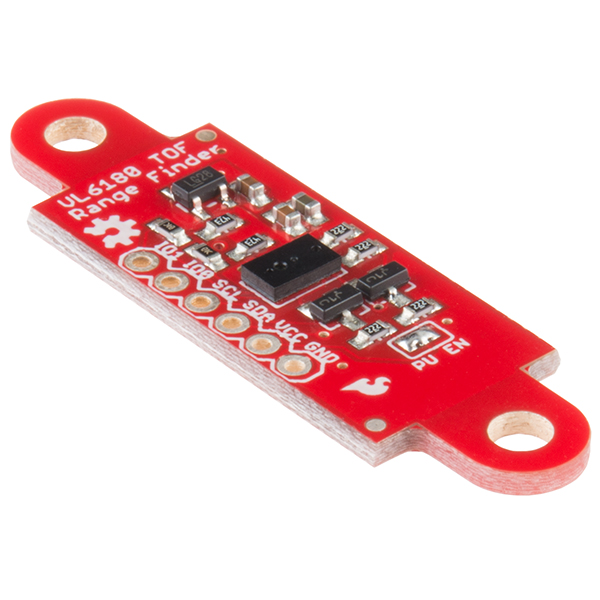
The robot is still work in progress, it now boasts a L293 motor driver, Nokia 5110 display, IR proximity sensors, MCP23008 I2C IO expander, buttons and an I2C gyro and accelerometer and bluetooth interface for Wii controller. Progress was halted on this project towards the end of last year to work on TractorBot, the Ipswich Makerspace entry for PiWars 2014. He does still continue to learn and tinker with the original robot and the LCD menu system is now operational.
Keith is very much looking forward to this years PiWars, last year was such a blast and the community spirit surrounding the event was amazing.