I have been experimenting with using Teensy-LC as USB gamepads as part of my Laser Defender Arcade machine. I found some articles with half examples, non functioning examples and many forums with people in the same situation as me, limited knowledge and a pile of errors.
Not being a software developer by trade, it has been an interesting journey recently into Unity with C# (courtesy of Ben Tristem, for giving me access to his course) and further delving into microcontrollers, this time the Teensy-LC.
I have found 2 solutions that I will document here.
1) MSF Fight Stick (XINPUT)
This actually works as documented: https://github.com/zlittell/MSF-FightStick. I copied the files into an arduino 1.8.6 directory and it compiled and uploaded.
The only gotchas I had were:
– Needed at least Arudino 1.8.6
– There was no rumble example
– XINPUT is limited to 4 devices of type xbox controller
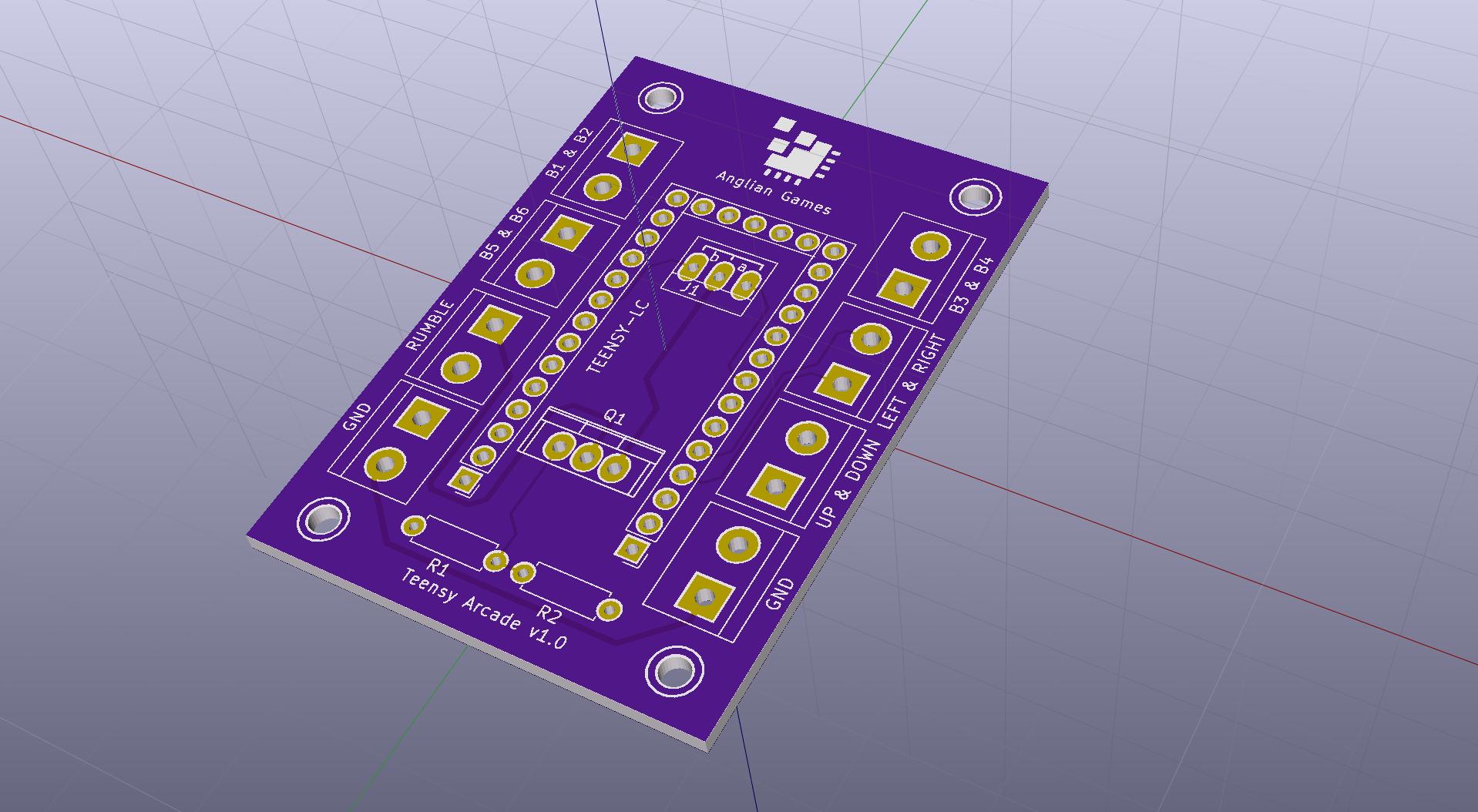
I have made a custom PCB to cope with 6 buttons, DPAD and Rumble Motor. I will make another post about my adventures in Kicad. Which I will link here: TBC
MSF Fight Stick is a very nice way to make a custom controller for XINPUT games. I am using XINPUT on Unity as I dislike the Unity Input system, as did a Canadian dude called Kenton, who instead made is own custom HID-based device also using the teensy.
2) Custom HID-based Controller
Kenton modified the usb libraries to make a generic DINPUT controller using a custom USB device type, as documented: https://blog.hamaluik.ca/posts/making-a-custom-teensy3-hid-joystick
In 2018, this has MANY gotchas, as it would not compile AT ALL, it threw error after error at me, and I *think* this is what I had to fix (all in avr/cores/teensy3):
– I started with a new (unspoilt) copy of the Arduino IDE 1.8.7
– I performed all the source modifications listed by Kenton on his blog but for the boards.txt it is different (see embigged).
teensyLC.menu.usb.arcade=Your Gamestick Name Here
teensyLC.menu.usb.arcade.build.usbtype=USB_ARCADE
teensyLC.menu.usb.arcade.fake_serial=teensy_gateway
The difference in the removal of “.name” took me 5 hours to find :'(
– I modified yield.cpp, as serial was not included it complains
#if defined(USB_SERIAL)
if (Serial.available()) serialEvent();
if (Serial1.available()) serialEvent1();
if (Serial2.available()) serialEvent2();
if (Serial3.available()) serialEvent3();
#ifdef HAS_KINETISK_UART3
if (Serial4.available()) serialEvent4();
#endif
#ifdef HAS_KINETISK_UART4
if (Serial5.available()) serialEvent5();
#endif
#if defined(HAS_KINETISK_UART5) || defined (HAS_KINETISK_LPUART0)
if (Serial6.available()) serialEvent6();
#endif
#endif
– Commented out like 651 in usb_desc.c (2017) as it conflicted
//#define CONFIG_DESC_SIZE MULTITOUCH_INTERFACE_DESC_POS+MULTITOUCH_INTERFACE_DESC_SIZE
Success
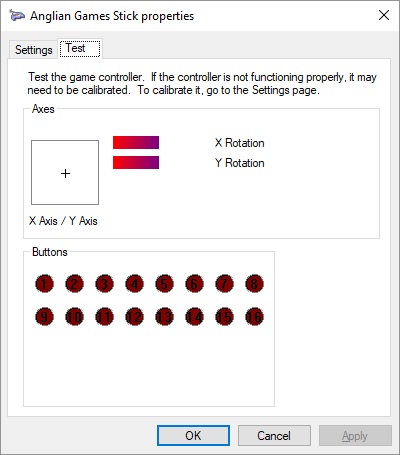
Now I have a device like this, with my own device name !

Make it analog
As a bonus, I made this extra function in usb_arcade.h to make the axis analog. Deadzone configuration option and full example coming soon.
void analog(uint8_t axis, uint16_t val) {
if(axis >= 4) return;
usb_arcade_data[axis] = map(val,0,1023,-127,127);
if(auto_send) usb_arcade_send();
}
Full Analog Stick example
const int BUTTON_1 = 1;
const int BUTTON_2 = 2;
const int BUTTON_3 = 3;
const int BUTTON_4 = 4;
const int BUTTON_5 = 5;
const int BUTTON_6 = 6;
const int BUTTON_7 = 7;
const int BUTTON_8 = 8;
const int BUTTON_9 = 9;
const int BUTTON_10 = 10;
const int BUTTON_11 = 11;
const int BUTTON_12 = 12;
const int ledPin = 13;
const int BUTTON_13 = 14;
const int BUTTON_14 = 15;
const int BUTTON_15 = 16;
const int BUTTON_16 = 17;
const int AXIS_X = A6;
const int AXIS_Y = A7;
const int AXIS_RX = A8;
const int AXIS_RY = A9;
boolean ledOn = false;
unsigned long lastTime = 0;
void setup()
{
pinMode(ledPin, OUTPUT);
pinMode(BUTTON_1, INPUT_PULLUP);
pinMode(BUTTON_2, INPUT_PULLUP);
pinMode(BUTTON_3, INPUT_PULLUP);
pinMode(BUTTON_4, INPUT_PULLUP);
pinMode(BUTTON_5, INPUT_PULLUP);
pinMode(BUTTON_6, INPUT_PULLUP);
pinMode(BUTTON_7, INPUT_PULLUP);
pinMode(BUTTON_8, INPUT_PULLUP);
pinMode(BUTTON_9, INPUT_PULLUP);
pinMode(BUTTON_10, INPUT_PULLUP);
pinMode(BUTTON_11, INPUT_PULLUP);
pinMode(BUTTON_12, INPUT_PULLUP);
pinMode(BUTTON_13, INPUT_PULLUP);
pinMode(BUTTON_14, INPUT_PULLUP);
pinMode(BUTTON_15, INPUT_PULLUP);
pinMode(BUTTON_16, INPUT_PULLUP);
pinMode(AXIS_X, INPUT);
pinMode(AXIS_Y, INPUT);
pinMode(AXIS_RX, INPUT);
pinMode(AXIS_RY, INPUT);
// read the entire joystick at once instead of per event
Arcade.setAutoSend(false);
lastTime = millis();
}
void loop()
{
unsigned long time = millis();
// run at 50 Hz
if(time - lastTime >= 20)
{
lastTime = time;
// read the data of all our buttons
// our buttons
Arcade.button(1, 1 - digitalRead(BUTTON_1));
Arcade.button(2, 1 - digitalRead(BUTTON_2));
Arcade.button(3, 1 - digitalRead(BUTTON_3));
Arcade.button(4, 1 - digitalRead(BUTTON_4));
Arcade.button(5, 1 - digitalRead(BUTTON_5));
Arcade.button(6, 1 - digitalRead(BUTTON_6));
Arcade.button(7, 1 - digitalRead(BUTTON_7));
Arcade.button(8, 1 - digitalRead(BUTTON_8));
Arcade.button(9, 1 - digitalRead(BUTTON_9));
Arcade.button(10, 1 - digitalRead(BUTTON_10));
Arcade.button(11, 1 - digitalRead(BUTTON_11));
Arcade.button(12, 1 - digitalRead(BUTTON_12));
Arcade.button(13, 1 - digitalRead(BUTTON_13));
Arcade.button(14, 1 - digitalRead(BUTTON_14));
Arcade.button(15, 1 - digitalRead(BUTTON_15));
Arcade.button(16, 1 - digitalRead(BUTTON_16));
Arcade.axis(0, analogRead(AXIS_X));
Arcade.axis(1, analogRead(AXIS_Y));
Arcade.axis(2, analogRead(AXIS_RX));
Arcade.axis(3, analogRead(AXIS_RY));
// send a packet now
Arcade.send();
// toggle our led
ledOn = !ledOn;
digitalWrite(ledPin, ledOn);
}
}
Next Steps
The next steps in USB controller development is to create my own custom HID descriptor that contains only the buttons, axes and hats I (want) need. This will come after learning much more about the lower layers of USB and setting myself up with some tools to monitor the bus. I will also get some analog devices (compass, accelerometer, potentiometer, temperature sensor, theremin?) to make some interesting input devices for my Unity games.
I hope you found this helpful.





 This works great as a throttle control in “Simple Planes”, next step is to build a housing for it, or maybe integrate it into a custom keyboard project.
This works great as a throttle control in “Simple Planes”, next step is to build a housing for it, or maybe integrate it into a custom keyboard project.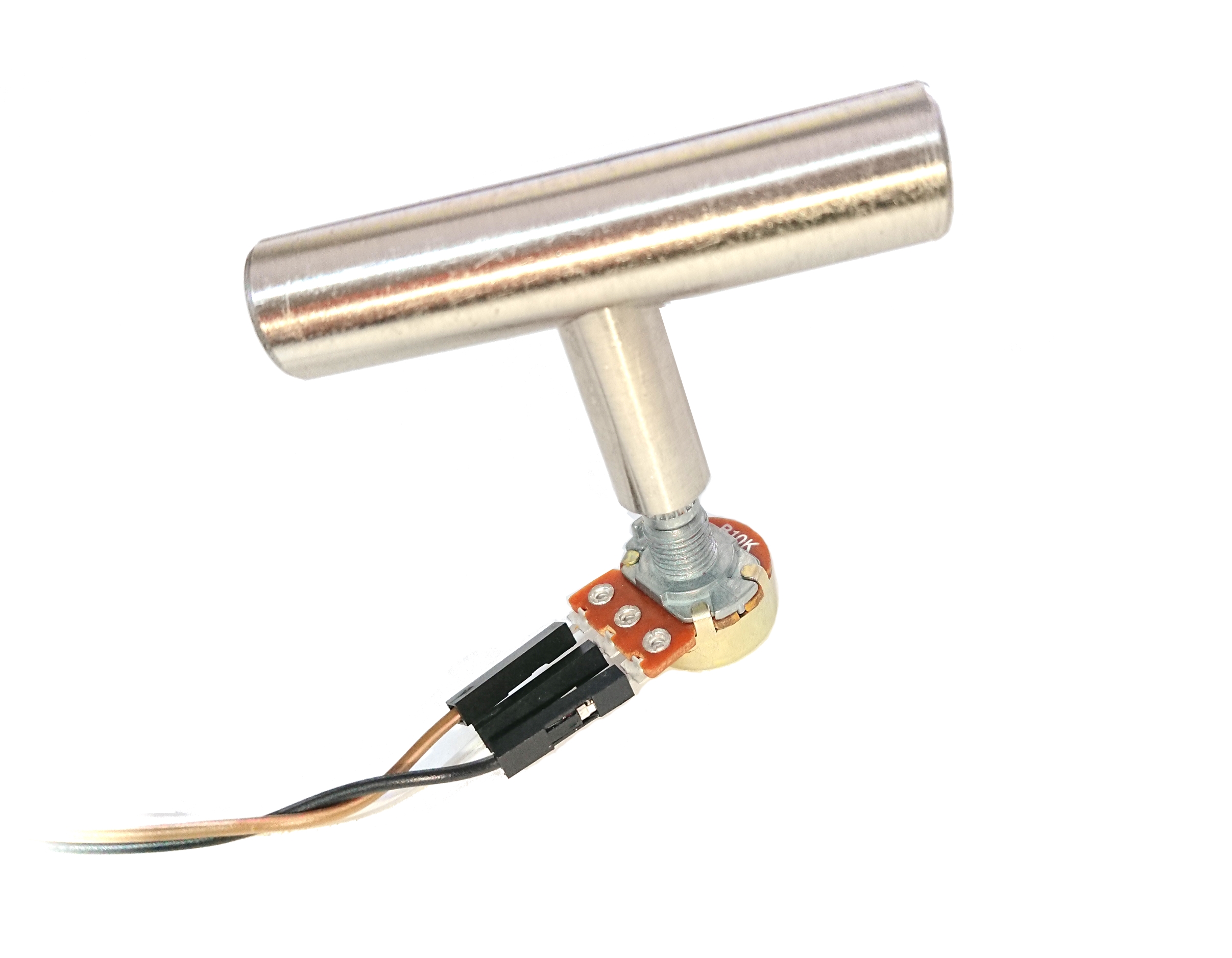
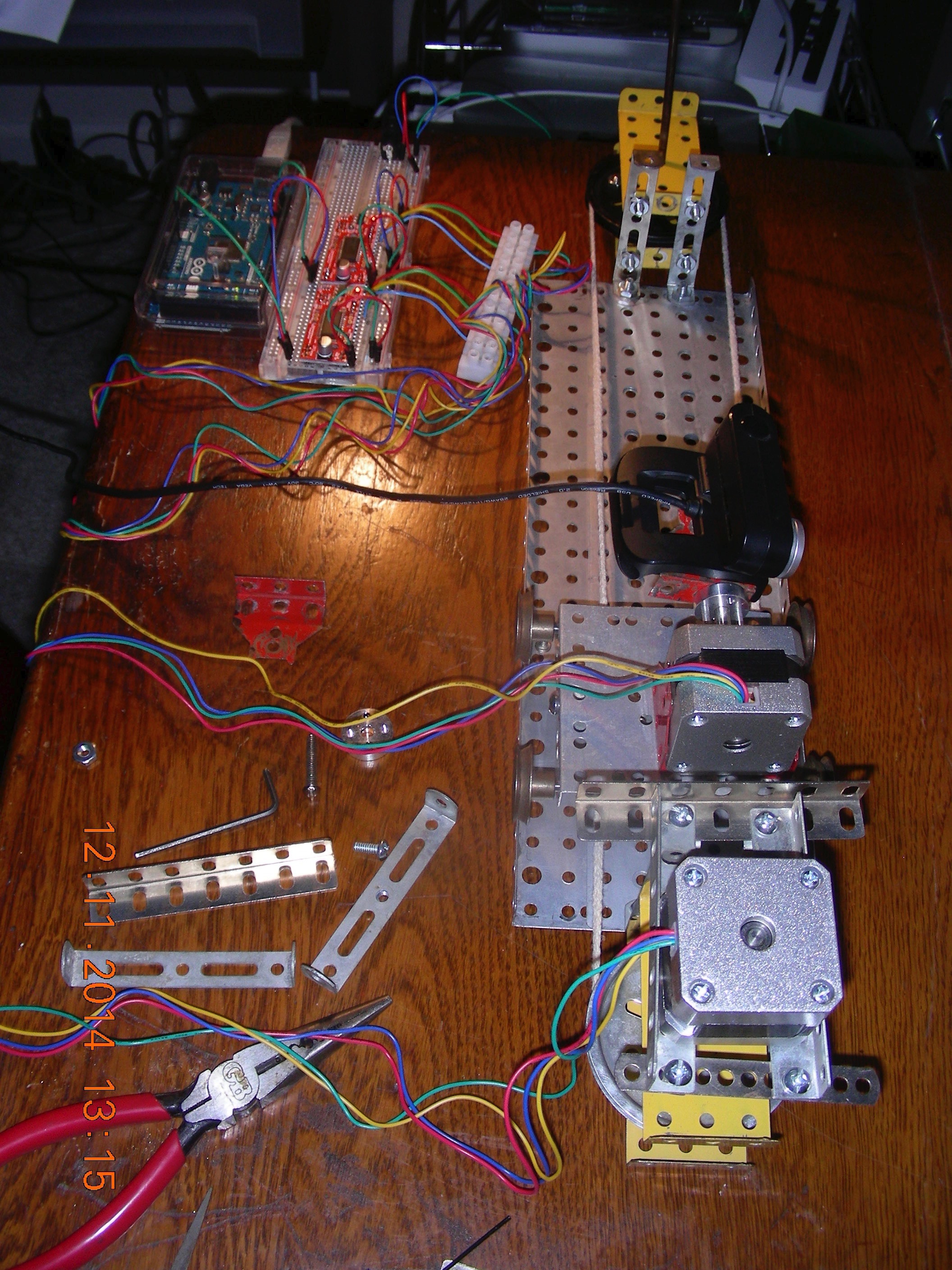
 When mounted on the stick, look a bit like this (rumble motor up underneath).
When mounted on the stick, look a bit like this (rumble motor up underneath). That’s it for now. Hoping to get my circuit boards next week!
That’s it for now. Hoping to get my circuit boards next week!